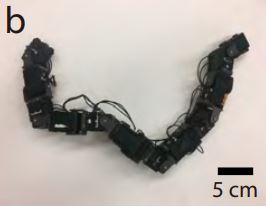
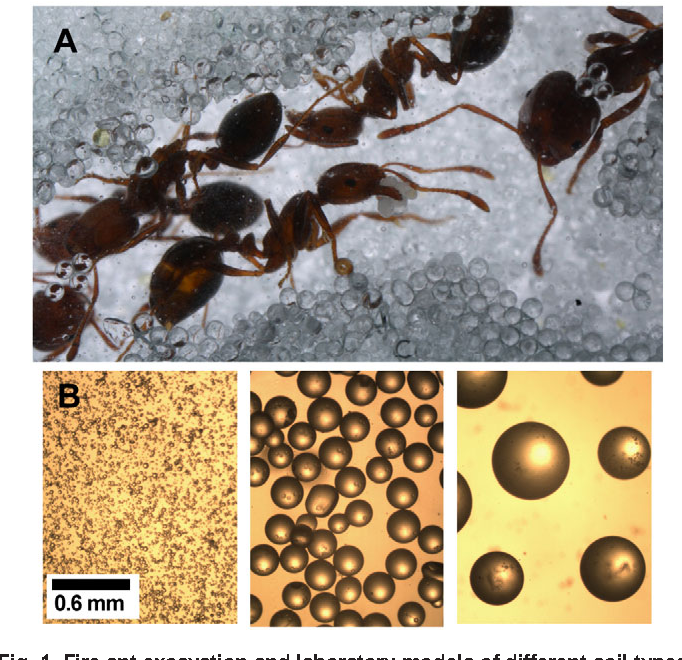
- Architecture of the insect society: comparative analysis of collective construction and social function of nests
-
P. B. Caine, A. T. Robertson, L. K. Treers, D. I. Goldman and M. A. D. Goodisman, Insectes Sociaux (2025), https://doi.org/10.1007/s00040-025-01057-7
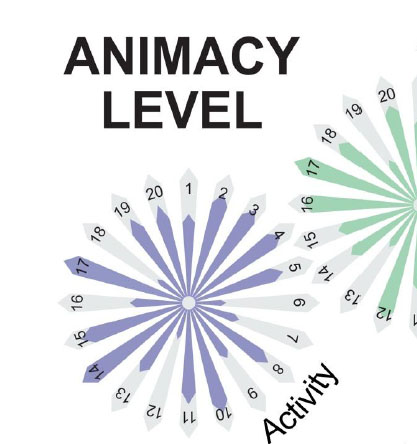
- Roadmap for Animate Matter
-
Giorgio Volpe, Nuno A. M. Araújo, Maria Guix, Mark Miodownik, Nicolas Martin, Laura Alvarez, Juliane Simmchen, Roberto Di Leonardo, Nicola Pellicciotta, Quentin Martinet, Jérémie Palacci, Wai Kit Ng, Dhruv Saxena, Riccardo Sapienza, Sara Nadine, João F. Mano, Reza Mahdavi, Caroline Beck Adiels, Joe Forth, Christian Santangelo, Stefano Palagi, Ji Min Seok, Victoria A. Webster-Wood, Shuhong Wang, Lining Yao, Amirreza Aghakhani, Thomas Barois, Hamid Kellay, Corentin Coulais, Martin van Hecke, Christopher J. Pierce, Tianyu Wang, Baxi Chong, Daniel I. Goldman, Andreagiovanni Reina, Vito Trianni, Giovanni Volpe, Richard Beckett, Sean P. Nair, and Rachel Armstrong, J. Phys.: Condens. Matter 37 (2025) 333501, https://doi:10.1088/1361-648X/adebd3
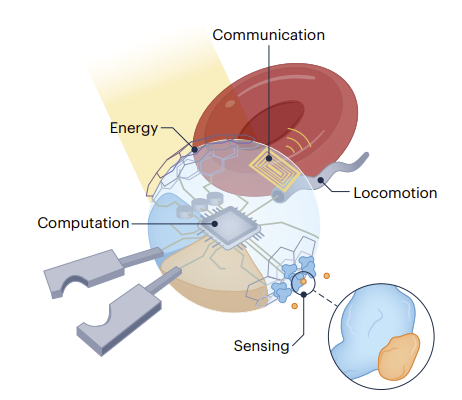
- Colloidal robotics
- Albert Tianxiang Liu, Marek Hempel, Jing Fan Yang, Allan M. Brooks, Ana Pervan, Volodymyr B. Koman, Ge Zhang, Daichi Kozawa, Sungyun Yang, Daniel I. Goldman, Marc Z. Miskin, Andréa W. Richa, Dana Randall, Todd D. Murphey, Tomás Palacios, and Michael S. Strano
Nature Materials (2024)

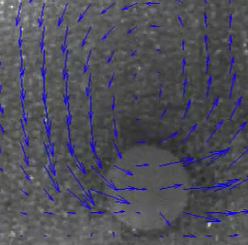
- Robot swarms meet soft matter physics
- Daniel I. Goldman and D. Zeb Rocklin
Science Robotics (2024)
- Advances in Modeling Dense Granular Media
- Ken Kamrin, Kimberly M. Hill, Daniel I. Goldman, and Jose E. Andrade,
Annual Review of Fluid Mechanics (2024)

- Physics of smart active matter: integrating active
matter and control to gain insights into
living systems
- Herbert Levine and Daniel I Goldman,
Soft Matter, Royal Society of Chemistry (2023)

- Committee on Biological Physics/Physics of Living Systems: A Decadal Survey
- William Bialek, Bridget Carragher, Ibrahim Cisse, Michael Desai, Olga Dudko, Daniel Goldman, Jane Kondev, Peter B. Littlewood, Andrea J. Liu, Mary E. Maxon, Jose N. Onuchic, Mark Schnitzer, Clare M. Waterman
The National Academies of Sciences, Engineering, Medicine (2022)
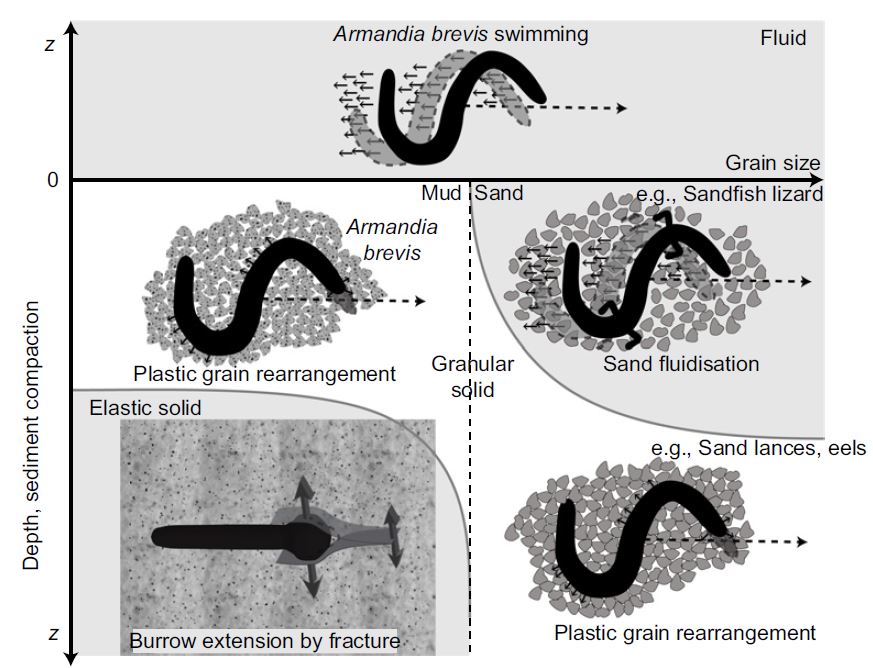
- Bio-inspired geotechnical engineering: principles, current work, opportunities and challenges,
- Alejandro Martinez, Jason Dejong, Idil Akin, Ali Aleali, Chloe Arson, Jared Atkinson, Paola Bandini, Tugce Baser, Rodrigo Borela, Ross Boulanger, Matthew Burral, Yuyan Chen, Clint Collins, Douglas Cortes, Sheng Dai, Theodore Dejong, Emanuela Del Dottore, Kelly Dorgan, Richard Fragaszy, J. David Frost, Robert Full, Majid Ghayoomi, Daniel I. Goldman, Nicholas Gravish, Ivan L. Guzman, James Hambleton, Elliot Hawkes, Michael Helms, David Hu, Lin Huang, Sichuan Huang, Christopher Hunt, Duncan Irschick, Hai Thomas Lin, Bret Lingwall, Alen Marr, Barbara Mazzolai, Benjamin McInroe, Tejas Murthy, Kyle O'Hara, Marianne Porter, Salah Sadek, Marcelo Sanchez, Carlos Santamarina, Lisheng Shao, James Sharp, Hannah Stuart, Hans Henning Stutz, Adam Summers, Julian Tao, Michael Tolley, Leon Van Paassen Gioacchino Viggiani, Daniel Wilson, Wei Wu, Xiong Yu, Junxing Zheng,
Géotechnique (2021)

- Surprising simplicities and syntheses in limbless self-propulsion in sand,
- Henry C. Astley, Joseph R. Mendelson III, Jin Dai, Chaohui Gong, Baxi Chong, Jennifer M. Rieser, Perrin E. Schiebel, Sarah S. Sharpe, Ross L. Hatton, Howie Choset, Daniel I. Goldman,
Journal of Experimental Biology (2020), 223 (5):
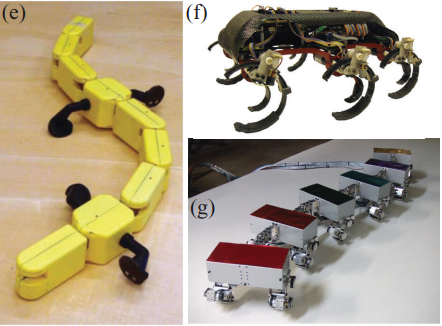
- Physics approaches to natural locomotion: Every robot is an experiment,
- Yasemin Ozkan Aydin, Jennifer M. Rieser, Christian M. Hubicki, William Savoie, Daniel I. Goldman
Chapter 6: Robotic Systems and Autonomous Platforms, 1st Edition, Advances in Materials and Manufacturing (2018)
- A review on locomotion robophysics: the study of movement at the intersection of robotics, soft matter, and dynamical systems,
- Jeffrey Aguilar,Tingnan Zhang, Feifei Qian, Mark Kingsbury, Benjamin McInroe, Nicole Mazouchova, Chen Li, Ryan Maladen,
Chaohui Gong, Matt Travers, Ross L. Hatton, Howie Choset, Paul B. Umbanhowar, and Daniel I. Goldman,
Reports on Progress in Physics 79 110001 (2016)
- Entangled Granular Media,
- Nick Gravish and Daniel I. Goldman,
Fluids, Colloids and Soft Materials: An Introduction to Soft Matter Physics, (2016)
- Beneath our feet: strategies for locomotion in granular media,
- A.E. Hosoi and Daniel I. Goldman,
Annual Review of Fluid Mechanics, 47, 431-453 (2015)
- Colloquium: Biophysical principles of undulatory self-propulsion in granular media,
- Daniel I. Goldman,
Reviews of Modern Physics, 86, 943 (2014)
- The effectiveness of resistive force theory in granular locomotion,
- Tingnan Zhang and Daniel I. Goldman,
Physics of Fluids, 26, 101308 (2014)
- Swimming in the desert,
- Yang Ding, Chen Li, and Daniel I. Goldman,
Physics Today, November, pg. 68 (2013)

-
Comparative studies reveal principles of movement on and within granular media,
- Yang Ding, Nick Gravish, Chen Li, Ryan D. Maladen, Nicole Mazouchova, Sarah S. Sharpe, Paul B. Umbanhowar, and Daniel I. Goldman,
IMA Workshop on Locomotion (2011)

-
Wiggling Through the World,
- Daniel I. Goldman and David L. Hu,
American Scientist, July/August 2010

-
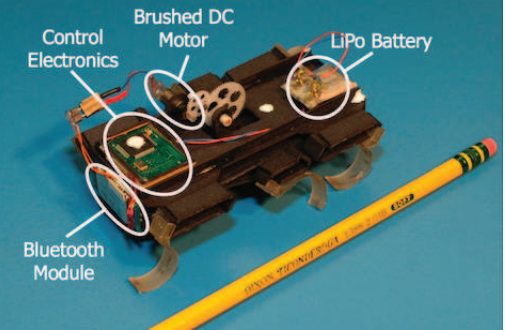
March of the SandBots,
- Daniel I. Goldman, Haldun Komsuoglu, Daniel E. Koditschek,
IEEE Spectrum, April 2009, pg. 30.
- The cover of the magazine featuring the work is posted here
- 2026
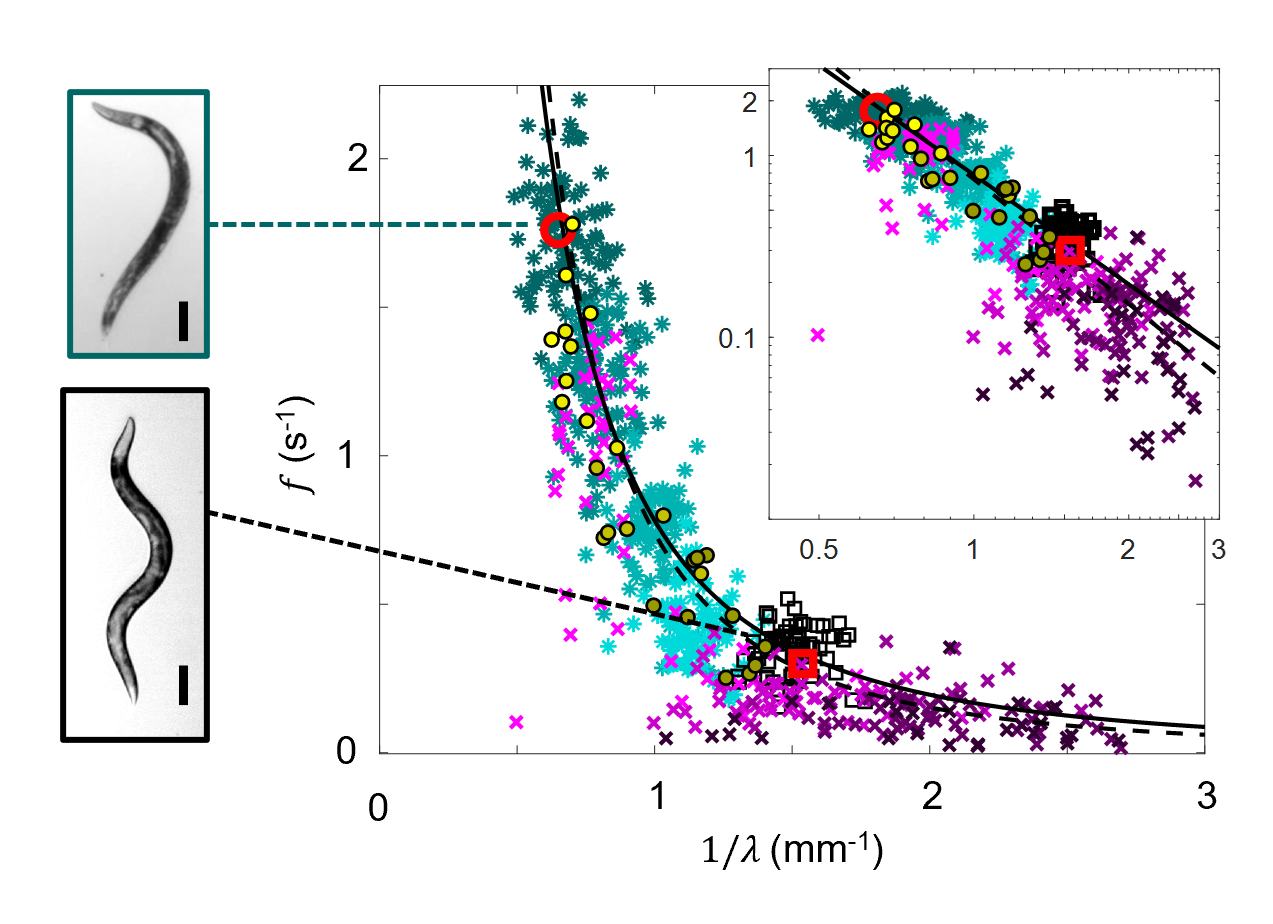
- Dispersion relations for active undulators in overdamped environments
- Christopher J. Pierce, Daniel Irvine, Lucinda Peng, Xuefei Lu, Hang Lu, and Daniel I. Goldman, Physical Review E 113, 065413 (2026), https://doi.org/10.1103/lszs-51bf
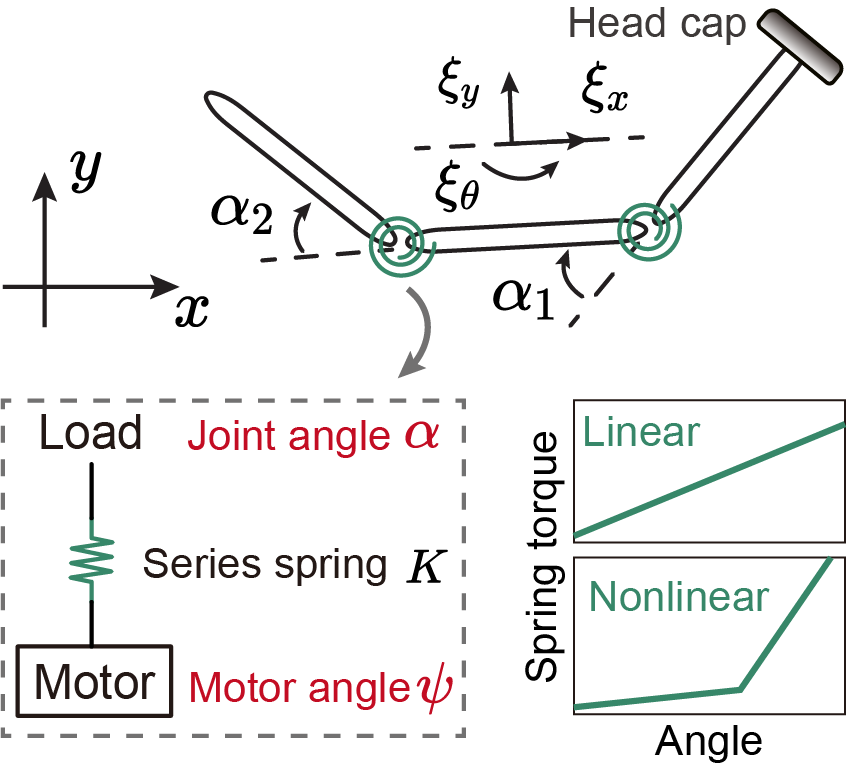
- Optimal swimming with body compliance in an overdamped medium
- Jianfeng Lin, Tianyu Wang, Baxi Chong, Matthew Fernandez, Zhaochen Xu,
and Daniel I. Goldman, Physical Review Applied 25, 054068 (2026), https://doi.org/10.1103/pbkh-py5h

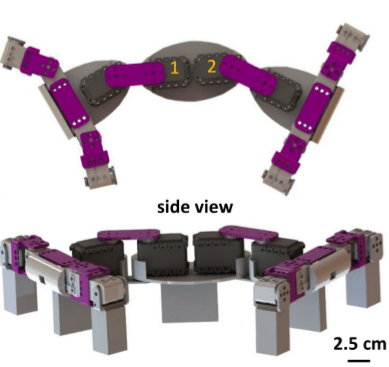
- Cross-link collective: Entangled robotic matter with cohesive motion
- Danna Ma, Baxi Chong, Daniel I. Goldman, and Kirstin H. Petersen, Science Robotics 11:114 (2026), https://doi.org/10.1126/scirobotics.aec6393
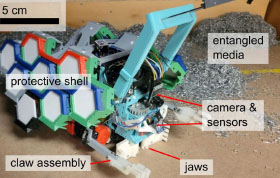
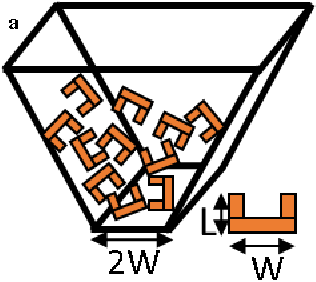
- Robot excavation and manipulation of geometrically cohesive granular media
- Laura K. Treers, Daniel Soto, Joonha Hwang, Michael A. D. Goodisman, and Daniel I. Goldman, Granular Matter, 28:35 (2026), https://doi.org/10.1007/s10035-025-01597-6
- Aubry–André localization transition for an active undulator
- Christopher J. Pierce, Tianyu Wang, Dmitri Kalinin, Andrew Zangwill, and Daniel I. Goldman, Proceedings of the National Academy of Sciences (PNAS) (2026), https://doi.org/10.1073/pnas.2519118123

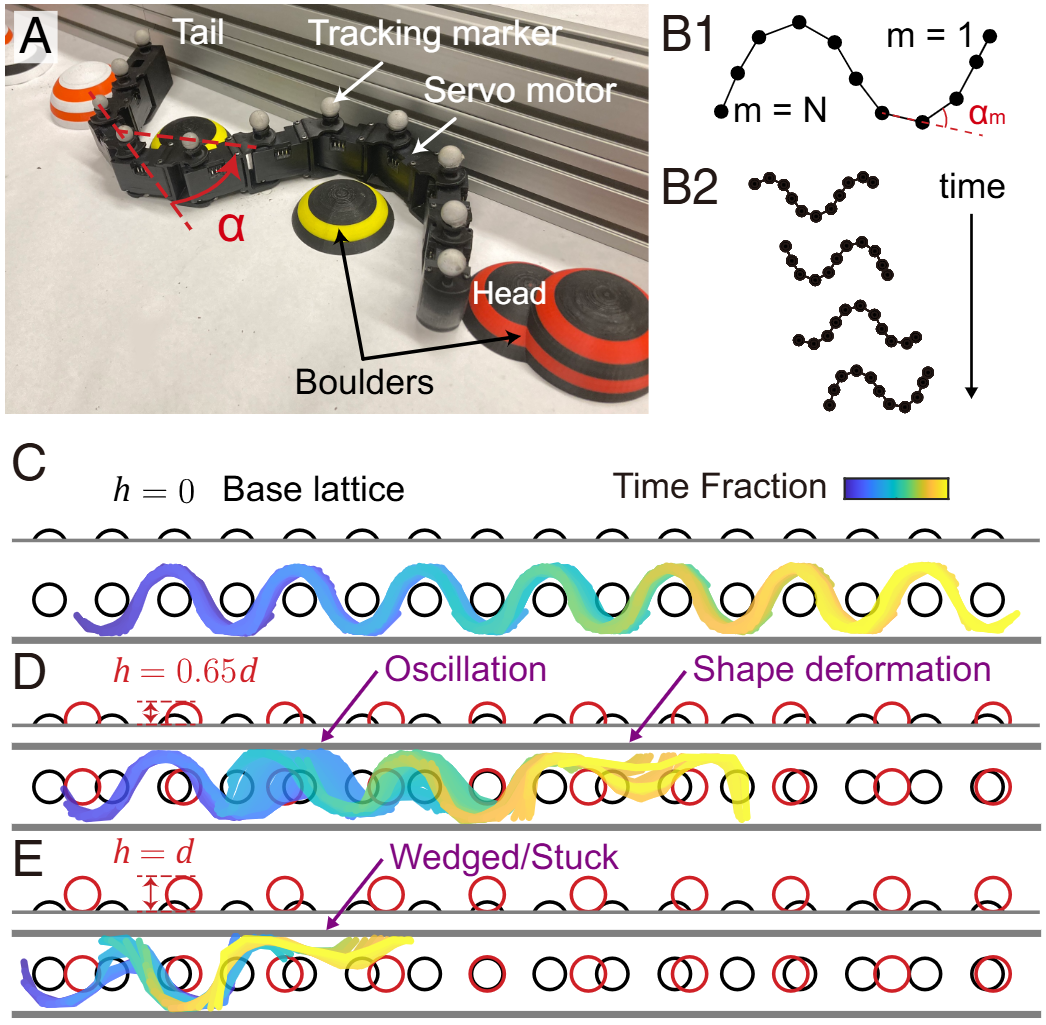
- Legged Locomotion in Lattices: Centipede Traversal of Obstacle-Rich Environments
- Christopher J. Pierce, Daniel Soto, Eva Erickson, Kelimar Diaz, Massimiliano Iaschi, Anna Lay, and Daniel I. Goldman, Annals of the New York Academy of Sciences, 1555:e70187 (2026), https://doi.org/10.1111/nyas.70187
- 2025

- Steering Elongate Multi-legged Robots by Modulating Body Undulation Waves
- Esteban Flores, Baxi Chong, Daniel Soto, and Daniel I. Goldman, International Conference on Intelligent Robots and Systems (2025), https://doi.org/10.48550/arXiv.2410.01050

- Probabilistic Approach to Feedback Control
Enhances Multilegged Locomotion on Rugged Landscapes
- Juntao He, Baxi Chong, Jianfeng Lin, Zhaochen Xu, Hosain Bagheri, Esteban Flores, and Daniel I. Goldman, IEEE Transactions on Robotics, Vol. 41, 2025
- Fault-Tolerant Multi-Robot Coordination with
Limited Sensing within Confined Environments
- Kehinde O. Aina, Hosain Bagheri, and Daniel I. Goldman,
17th meeting of The International Symposium on Distributed Autonomous Robotic Systems, Springer Proceedings in Advanced Robotics, vol. 34 (2025), https://doi.org/10.1007/978-3-032-04584-3_22
- Tactile sensing enables vertical obstacle negotiation for elongate many-legged robots
- Juntao He, Baxi Chong, Massimiliano Iaschi, Vincent R. Nienhusser, Sehoon Ha, and Daniel I. Goldman, Robotics: Science and Systems, ArXiv abs/2504.08615 (2025)
- AquaMILR+: Design of an untethered limbless robot for complex aquatic terrain navigation
- Matthew Fernandez, Tianyu Wang, Galen Tunnicliffe, Donoven Dortilus, Peter Gunnarson,
John O. Dabiri, and Daniel I. Goldman, 2025 IEEE International Conference on Robotics and Automation (ICRA) May 19-23, 2025. Atlanta, GA USA
- AquaMILR: Mechanical intelligence simplifies control of undulatory robots in cluttered fluid environments
- Tianyu Wang, Nishanth Mankame, Matthew Fernandez, Velin Kojouharov, and Daniel I. Goldman, 2025 IEEE International Conference on Robotics and Automation (ICRA) May 19-23, 2025. Atlanta, GA USA
- Addition of a peristaltic wave improves multi-legged locomotion performance on complex terrains
- Massimiliano Iaschi, Baxi Chong, Tianyu Wang, Jianfeng Lin, Juntao He, Daniel Soto, Zhaochen Xu, and Daniel I. Goldman, 2025 IEEE International Conference on Robotics and Automation (ICRA) May 19-23, 2025. Atlanta, GA USA,
https://doi.org/10.48550/arXiv.2410.01046
- Effective self-righting strategies for elongate multi-legged robots
- Erik Teder, Baxi Chong, Juntao He, Tianyu Wang, Massimiliano Iaschi, Daniel Soto, and Daniel I. Goldman, 2025 IEEE International Conference on Robotics and Automation (ICRA) May 19-23, 2025. Atlanta, GA USA
- Extending granular resistive force theory to cohesive powder-scale media
- Deniz Kerimoglu, Eloïse Marteau, Daniel Soto, and Daniel I. Goldman, J. Terramechanics, 120, 101058 (2025), https://doi.org/10.1016/j.jterra.2025.101058
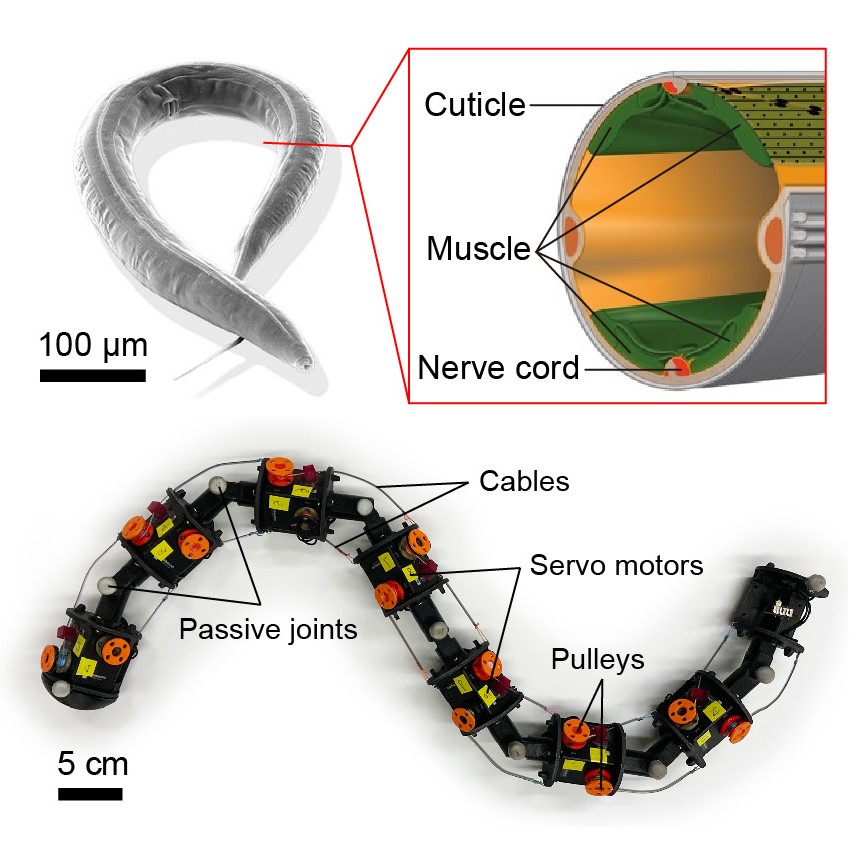
- Neuromechanical Phase Lags and Gait Adaptation in the Nematode C. elegans
- Christopher J. Pierce, Yang Ding, Lucinda Peng, Xuefei Lu, Baxi Chong, Hang Lu, and Daniel I. Goldman, PRX Life, 3, 023001 (2025), https://journals.aps.org/prxlife/abstract/10.1103/PRXLife.3.023001
- The value of hands-on experiments in an upper-division classical mechanics course
- Steven W. Tarr , Joseph S. Brunner, Emily Alicea-Mu˜noz,and Daniel I. Goldman, Emergent Scientist 9, 1 (2025), https://doi.org/10.1051/emsci/2024003
- 2024
- Minimal design of a synthetic cilium
- Clément Moreau, Benjamin J. Walker, Rebecca N. Poon, Daniel Soto, Daniel I. Goldman, Eamonn A. Gaffney, and Kirsty Y. Wan, Physical Review Research 6, L042061 (2024), https://doi.org/10.1103/PhysRevResearch.6.L042061

- Learning manipulation of steep granular slopes
for fast Mini Rover turning
- Deniz Kerimoglu, Daniel Soto, Malone Lincoln Hemsley, Joseph Brunner, Sehoon Ha, Tingnan Zhang
and Daniel I. Goldman, 2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 16985-16990, https://doi.org/10.48550/arXiv.2310.01273
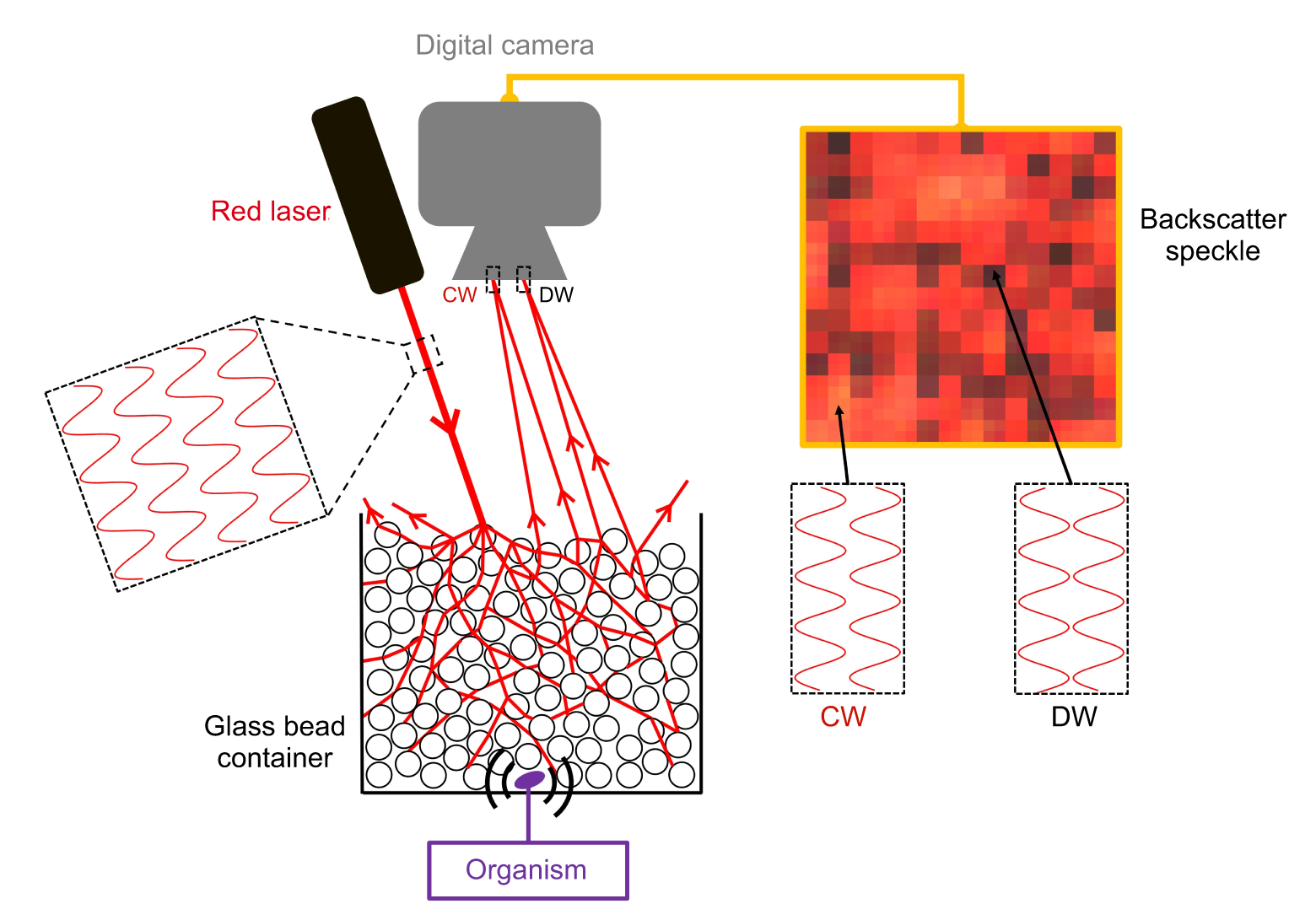
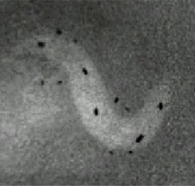
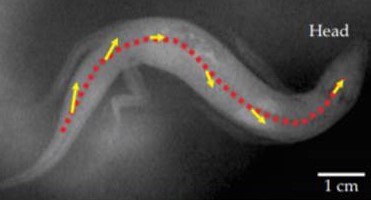
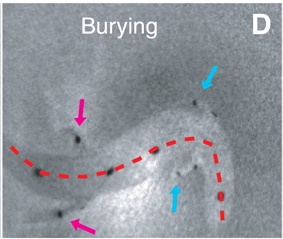
- Detecting subtle subterranean movement via laser speckle imaging
- Hosain Bagheri, Michael A. D. Goodisman Daniel I. Goldman, Journal of Experimental Biology 2024,
https://doi.org/10.1242/jeb.247267
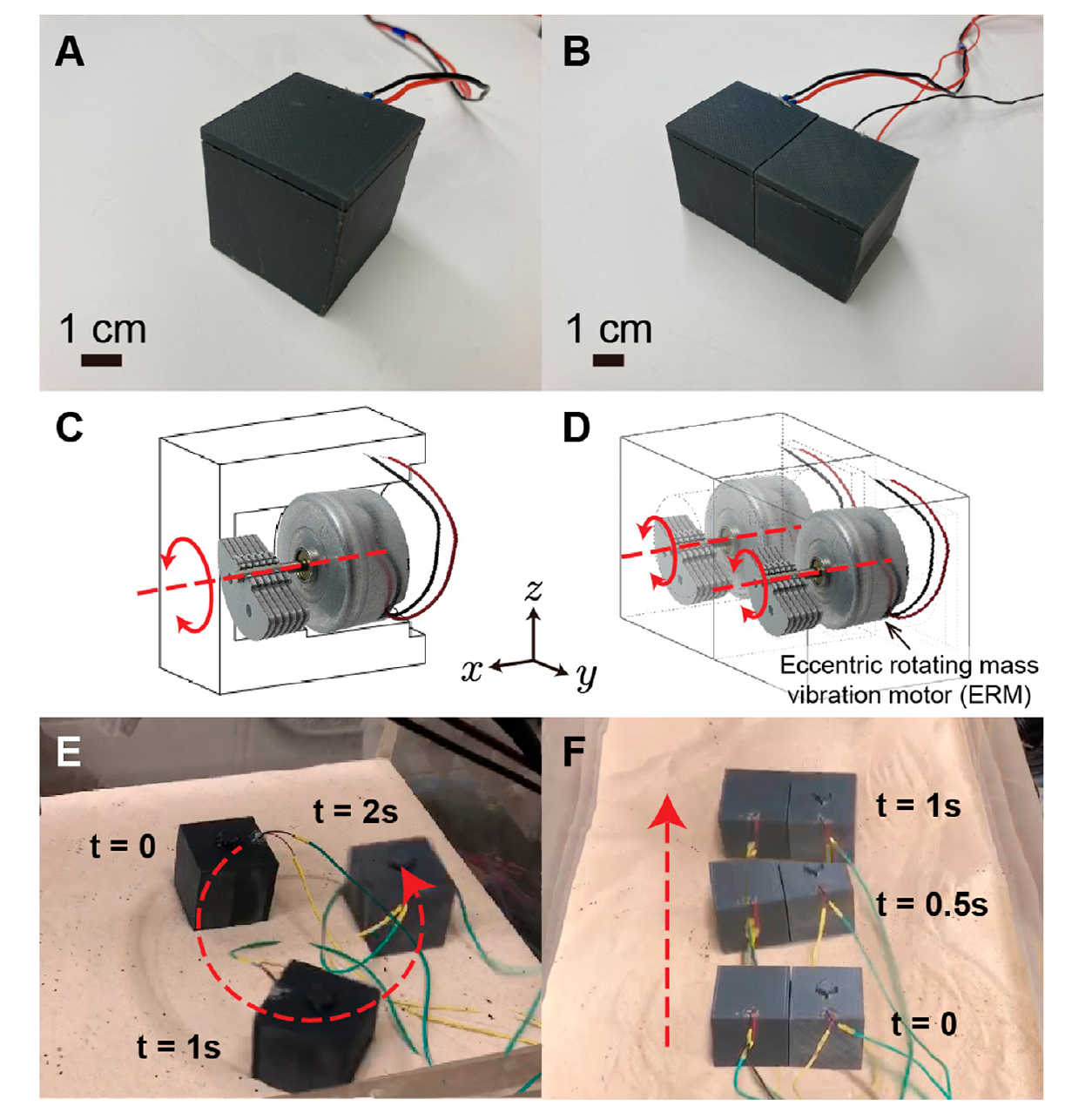
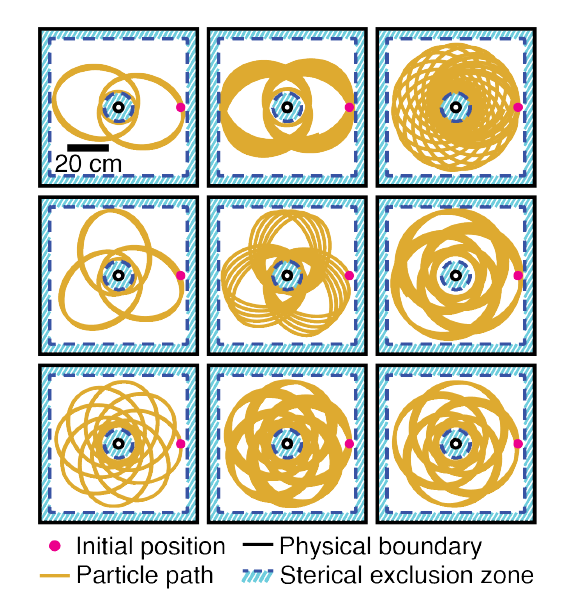
- Robust self-propulsion in sand using simply controlled vibrating cubes
- Bangyuan Liu, Tianyu Wang, Deniz Kerimoglu, Velin Kojouharov, Frank L. Hammond III and Daniel I. Goldman, Frontiers in Robotics and AI, 2024, https://doi.org/10.3389/frobt.2024.1298676
- Anisotropic body compliance facilitates robotic sidewinding in complex environments
- Velin Kojouharov, Tianyu Wang, Matthew Fernandez, Jiyeon Maeng, Daniel I. Goldman,
2024 IEEE International Conference on Robotics and Automation (ICRA), Yokohama, Japan, 2024, pp. 11691-11697 https://doi.org/10.1109/ICRA57147.2024.10611625
- Geometric phase predicts locomotion performance in undulating living systems across scales
- Jennifer M. Rieser, Baxi Chong, Chaohui Gong, Henry C. Astley, Perrin E. Schiebel, Kelimar Diaz, Christopher J. Pierce, Hang Lu, Ross L. Hatton, Howie Choset, and Daniel I. Goldman,
PNAS Vol. 121 No. 24 e2320517121 (2024),

- Probing Hydrodynamic Fluctuation-Induced Forces with an Oscillating Robot
- Steven W. Tarr, Joseph S. Brunner, Daniel Soto, and Daniel I. Goldman,
Physical Review Letters 132, 084001 (2024)
- 2023

- The rhizodynamics robot: Automated imaging system for studying long-term dynamic root growth,
- Aradhya Rajanala, Isaiah W. Taylor, Erin McCaskey, Christopher Pierce, Jason Ligon, Enes Aydin, Carrie Hunner, Amanda Carmichael, Lauren Eserman, Emily E. D. Coffee, Anupam Mijar, Milan Shah, Philip N. Benfey, Daniel I. Goldman,
PLOS ONE 18(12) (2023): e0295823.
- Mechanical intelligence simplifies control in terrestrial limbless locomotion,
- Tianyu Wang, Christopher Pierce, Velin Kojouharov, Baxi Chong, Kelimar Diaz, Hang Lu, and Daniel I Goldman,
Science Robotics 8, eadi2243(2023).
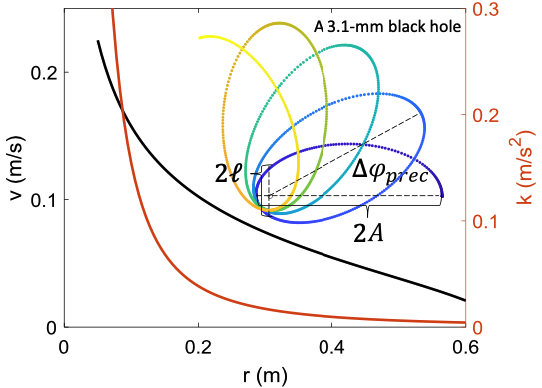
- A robophysical model of spacetime dynamics,
- Shengkai Li, Hussain N. Gynai, Steven W. Tarr, Emily Alicea-Muñoz, Pablo Laguna, Gongjie Li, and Daniel I Goldman,
Scientific Reports 13, 21589 (2023).
- Optimizing contact patterns for robot locomotion via geometric mechanics,
- Baxi Chong, Tianyu Wang, Bo Lin, Shengkai Li, Pranav C Muthukrishnan, Juntao He, Daniel Irvine, Howie Choset, Grigoriy Blekherman, and Daniel I Goldman,
The International Journal of Robotics Research 42 (10), 859-873, 2023
- Gait design for limbless obstacle aided locomotion
using geometric mechanics,
- Baxi Chong, Tianyu Wang, Daniel Irvine, Velin Kojouharov, Bo Lin, Howie Choset, Daniel I Goldman, and Grigoriy Blekherman,
Robotics, Science and Systems 2023, 10 July 2023
- Toward a 3D physical model of diffusive polymer chains,
- Andras Karsai, Grace J. Cassidy, Aradhya P. Rajanala,
Lixinhao Yang, Deniz Kerimoglu, James C. Gumbart, Harold D. Kim and Daniel I. Goldman,
Frontiers in Physics, 29 June 2023
- Agitated ants: regulation and self-organization of incipient nest excavation via collisional cues,
- Ram Avinery, Kehinde O Aina, Carl J Dyson, Hui-Shun Kuan, Meredith D Betterton, Michael A D Goodisman, and Daniel I Goldman,
J. R. Soc Interface 20: 2022057 (2023)
- Multilegged matter transport: A framework for locomotion on noisy landscapes,
- Baxi Chong, Juntao He, Daniel Soto, Tianyu Wang, Daniel Irvine, Grigoriy Blekherman, and Daniel I. Goldman,
Science (2023), Vol 380, Issue 6644, pp. 509-515
- Self-propulsion via slipping: Frictional swimming in multilegged locomotors,
- Baxi Chong, Juntao He, Shengkai Li, Eva Erickson, Kelimar Diaz, Tianyu Wang, Daniel Soto, and Daniel I. Goldman,
Proceedings of the National Academy of Sciences (PNAS) (2023)
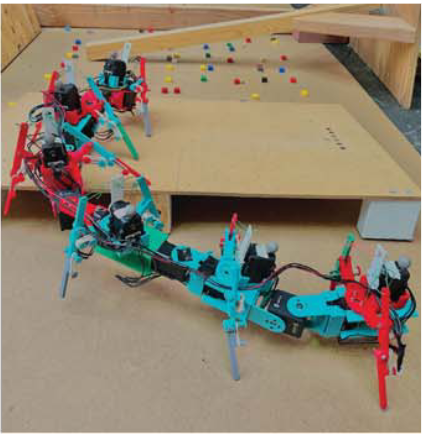
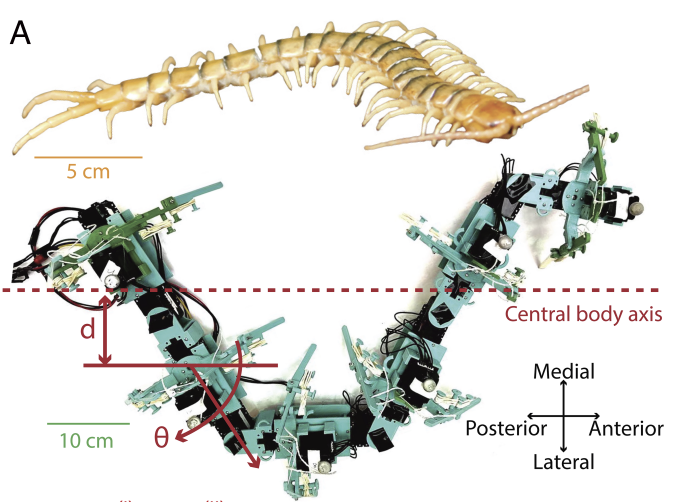
- Active and passive mechanics for rugose terrain traversal in centipedes,
- Kelimar Diaz, Eva Erickson, Baxi Chong, Daniel Soto, and Daniel I. Goldman,
Journal of Experimental Biology (JEB) (2023),Volume 226, No. 4, jeb244688
- Amorphous entangled active matter,
- William Savoie, Harry Tuazon, Ishant Tiwari, M. Saad Bhamla, and Daniel I. Goldman,
Soft Matter, 2023, 19, 1952-1965
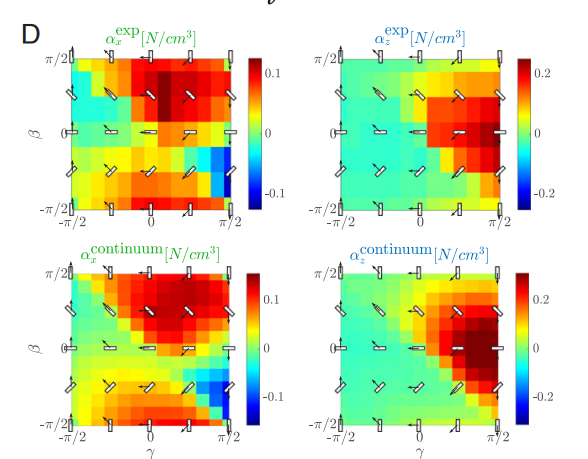
- Mechanistic framework for reduced-order models in soft materials: Application to three-dimensional granular intrusion,
- Shashank Agarwal, Daniel I. Goldman, and Ken Kamrin,
Proceedings of the National Academy of Sciences (PNAS) (2023), e2214017120
- 2022
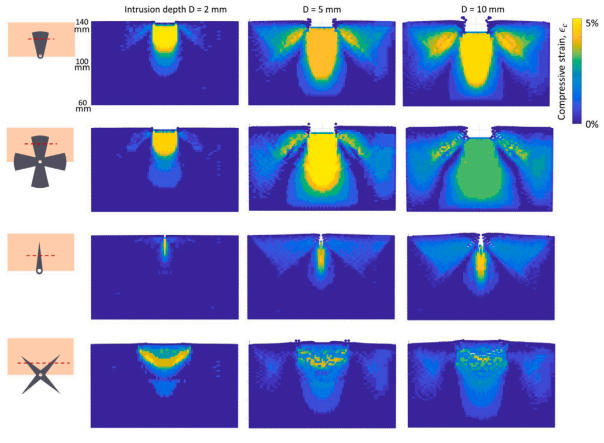
- Simulation of compound anchor intrusion in dry sand by a hybrid FEM+SPH method,
- Haozhou He, Andras Karsai, Bangyuan Liu, Frank L. Hammond, Daniel I. Goldman, and Chloé Arson,
Advanced Intelligence Systems (2022), 2200119
- Real-Time Remodeling of Granular Terrain for Robot Locomotion,
- Andras Karsai, Deniz Kerimoglu, Daniel Soto, Sehoon Ha, Tingnan Zhang,
and Daniel I. Goldman,
Advanced Intelligence Systems (2022), 2200119
- Robotic swimming in curved space via geometric phase,
- Shengkai Li, Tianyu Wang, Velin H. Kojouharov, James McInerney, Enes Aydin, Yasemin Ozkan-Aydin, Daniel I. Goldman,and D. Zeb Rocklin,
Proceedings of the National Academy of Sciences (PNAS) (2022), Vol. 119, No. 31, e2200924119
- Field-mediated locomotor dynamics on highly deformable surfaces,
- Shengkai Li, Yasemin Ozkan-Aydin, Charles Xiao, Gabriella Small, Hussain N. Gynai, Gongjie Li, Jennifer M. Rieser, Pablo Laguna, and Daniel I. Goldman,
Proceedings of the National Academy of Sciences (PNAS) (2022), Vol. 119, No. 30, e2113912119
- A general locomotion control framework
for multi-legged locomotors,
- Baxi Chong, Yasemin O Aydin, Jennifer M Rieser, Guillaume Sartoretti, Tianyu Wang, Julian Whitman, Abdul Kaba, Enes Aydin, Ciera McFarland, Kelimar Diaz, Jeffery W. Rankin , Krijn B. Michel, Alfredo Nicieza, John R. Hutchinson, Howie Choset, and Daniel I. Goldman,
Bioinspiration and Biomimetics (2022), Vol. 17, 046015

- Coordinating tiny limbs and long bodies: Geometric mechanics of lizard terrestrial swimming,
- Baxi Chong, Tianyu Wang, Eva Erickson, Philip J. Bergmann, and Daniel I. Goldman,
Proceedings of the National Academy of Sciences (PNAS) (2022), Vol. 119, No. 27, e2118456119

- Oxygenation-Controlled Collective Dynamics in Aquatic Worm Blobs,
- Harry Tuazon, Emily Kaufman, Daniel I. Goldman, M. Saad Bhamla,
Integrative and Comparative Biology (2022), icac089
- Toward Task Capable Active Matter: Learning to Avoid Clogging in Confined Collectives via Collisions,
- Kehinde O. Aina, Ram Avinery, Hui-Shun Kuan, Meredith D. Betterton, Michael A. D. Goodisman, and Daniel I. Goldman,
Frontiers(2022), Volume 10, No. 725667
- Robots as models of evolving systems,
- Gao Wang, Trung V. Phan, Shengkai Li, Jing Wang, Yan Peng, Guo Chen, Junle Qu, Daniel I. Goldman, Simon A. Levin, Kenneth Pienta, Sarah Amend, Robert H. Austin, and Liyu Liu,
Proceedings of the National Academy of Sciences (PNAS) of the United States of America (2022), Volume 119, No. 12
- Construction and Excavation by Collaborative
Double-Tailed SAW Robots,
- Luyang Robby Huang, Alexander Zhu, Kathleen Wang, Daniel I. Goldman, Andy Ruina,
and Kirstin H. Petersen,
IEEE Robotics and Automation Letters (2022), Volume 7, No. 2
- 2021

- Air-Fluidized Aggregates of Black
Soldier fly Larvae,
- Hungtang Ko, Grace J. Cassidy, Olga Shishkov, Enes Aydin, David L. Hu, and
Daniel I. Goldman,
Frontiers in Physics (2021), Volume 9, Article 734447
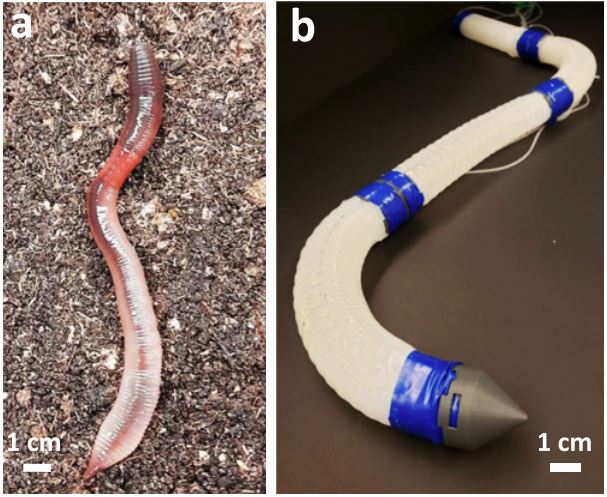
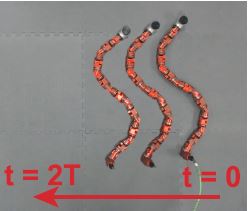
- Lateral bending and buckling aids biological and robotic earthworm anchoring and locomotion,
- Yasemin Ozkan-Aydin, Bangyuan Liu, Alexandra Carruthers Ferrero, Max Seidel, Frank L Hammond III, and Daniel I Goldman,
Bioinspiration and Biomimetics (2021), Volume 17, Article 016001
- Emergent Collective Locomotion in an
Active Polymer Model of Entangled Worm Blobs,
- Chantal Nguyen, Yasemin Ozkan-Aydin, Harry Tuazon, Daniel. I. Goldman, M. Saad Bhamla, and Orit Peleg,
Frontiers in Physics (2021), Volume 9, Article 734499
- Frequency modulation of body waves to improve performance of sidewinding robots,
- Baxi Chong, Tianyu Wang, Jennifer M. Rieser, Bo Lin, Abdul Kaba, Grigoriy Blekherman, Howie Choset, and Daniel I. Goldman,
International Journal of Robotics Research (IJRR) (2021), 2783649211037715
- Coordination of lateral body bending and leg movements for sprawled posture quadrupedal locomotion,
- Baxi Chong, Yasemin Ozkan Aydin, Chaohui Gong, Guillaume Sartoretti, Yunjin Wu, Jennifer M. Rieser, Haosen Xing, Perrin E. Schiebel, Jeffery W. Rankin , Krijn B. Michel, Alfredo Nicieza, John R. Hutchinson, Daniel I.Goldman, and Howie Choset,
International Journal of Robotics Research (IJRR) (2021), Volume 40, Number 4-5, pages 747-763.
- Enhancing Legged Robot Navigation
of Rough Terrain via Tail Tapping,
- Daniel Soto, Kelimar Diaz, and Daniel I. Goldman,
Climbing and Walking Robots Conference (2021), pages 213-225
- A minimal robophysical model of quadriflagellate self-propulsion,
- Kelimar Diaz, Tommie L. Robinson, Yasemin Ozkan-Aydin, Enes Aydin,
Daniel I. Goldman and Kirsty Y. Wan,
Bioinspiration and Biomimetics (2021), Volume 16, Number 6, 066001

- Effect of two parallel intruders on total work during granular penetrations,
- Swapnil Pravin, Brian Chang, Endao Han, Lionel London, Daniel I. Goldman, Heinrich M. Jaeger, and S. Tonia Hsieh
Physical Review E (2021), Volume 104, Number 2, 024902
- Self-reconfigurable multilegged robot swarms collectively accomplish challenging terradynamic tasks,
- Yasemin Ozkan-Aydin and Daniel I. Goldman
Science Robotics (2021), Volume 6, Number 56, eabf1628
- Moving sidewinding forward: optimizing contact
patterns for limbless robots via geometric mechanics,
- Baxi Chong, Tianyu Wang, Bo Lin, Shengkai Li, Grigoriy Blekherman, Howie Choset, and Daniel I. Goldman,
Robotics: Science and Systems (2021)
- Efficacy of simple continuum models for diverse granular intrusions,
- Shashank Agarwal, Andras Karsai, Daniel I. Goldman, Ken Kamrin,
Soft Matter (2021), Volume 17, pages 7196-7209
- Controlling subterranean forces enables a fast, steerable, burrowing soft robot
- Nicholas D. Naclerio, Andras Karsai, Mason Murray-Cooper, Yasemin Ozkan-Aydin, Enes Aydin, Daniel I. Goldman, Elliot W. Hawkes
Science Robotics: Volume 6, Issue 55, eabe2922
- Surprising simplicity in the modeling of dynamic granular intrusion
- Shashank Agarwal, Andras Karsai, Daniel I. Goldman, Ken Kamrin,
Science Advances (2021), Volume 7, Number 17, eabe0631
- Programming Active Cohesive Granular Matter with Mechanically Induced Phase Changes
- Shengkai Li, Bahnisikha Dutta, Sarah Cannon, Joshua J. Daymude, Ram Avinery, Enes Aydin, Andréa W. Richa, Daniel I. Goldman, Dana Randall,
Science Advances (2021), Volume 7, Number 17, eabe8494

- Emergent Field-Driven Robot Swarm States
- Gao Wang, Trung V. Phan, Shengkai Li, Michael Wombacher, Junle Qu, Yan Peng, Guo Chen, Daniel I. Goldman, Simon A. Levin, Robert H. Austin, Liyu Liu,
Physical Review Letters (2021), Volume 126, Number 10, 108002
- Mechanism and function of root circumnutation
- Isaiah Taylor, Kevin Lehner, Erin McCaskey, Niba Nirmal, Yasemin Ozkan-Aydin, Mason Murray-Cooper, Rashmi Jain, Elliot W. Hawkes, Pamela C. Ronald, Daniel I. Goldman, Philip N. Benfey
Proceedings of the National Academy of Sciences (PNAS) of the United States of America (2021), Volume 188, Number 8, e2018940118
- Collective dynamics in entangled worm and robot blobs
- Yasemin Ozkan-Aydin, Daniel I. Goldman, M. Saad Bhamla
Proceedings of the National Academy of Sciences (PNAS) of the United States of America (2021), Volume 118, Number 6, e2010542118
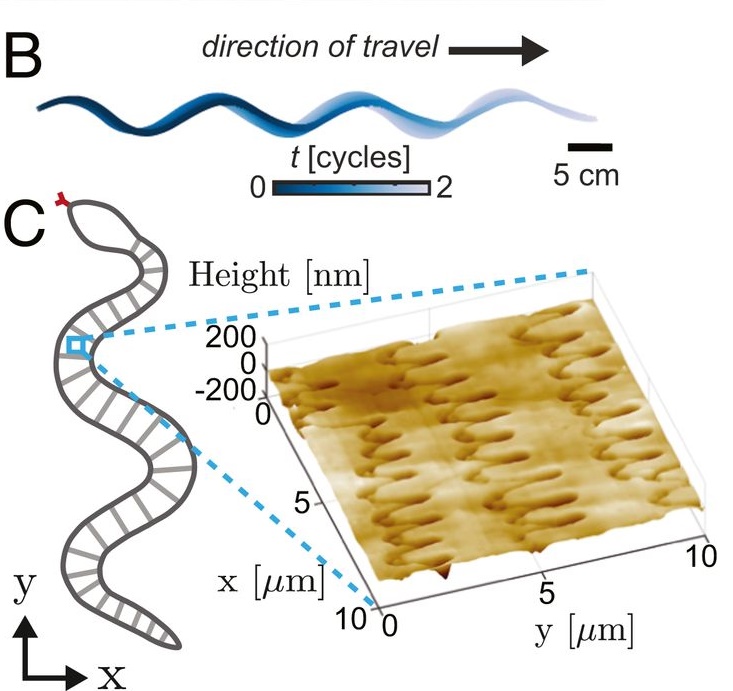
- Functional consequences of convergently evolved microscopic skin features on snake locomotion
- Jennifer M. Rieser, Tai-De Li, Jessica L. Tingle, Daniel I. Goldman, Joseph R. Mendelson III,
Proceedings of the National Academy of Sciences (PNAS) of the United States of America (2021), Volume 118, Number 6, e2018264118

- Low rattling: A predictive principle for self-organization in active collectives
- Pavel Chvykov, Thomas A. Berrueta, Akash Vardhan, William Savoie, Alexander Samland, Todd D. Murphey, Kurt Wiesenfeld, Daniel I. Goldman, Jeremy L. England,
Science (2021), Volume 371, Issue 6524, pages 90-95
- 2020
- Frequency Modulation of Body Waves to Improve Performance of Limbless Robots
- Baxi Chong, Tianyu Wang, Jennifer M. Rieser, Abdul Kaba, Howie Choset, Daniel I. Goldman,
Robots: Science and Systems 2020

- The Omega Turn: A Biologically-Inspired Turning Strategy for Elongated Limbless Robots
- Tianyu Wang, Baxi Chong, Kelimar Diaz, Julian Whitman, Hang Lu, Matthew Travers, Daniel I. Goldman, Howie Choset,
2020 International Conference on Intelligent Robots and Systems (IROS), pages 7766-7771
- Optimizing coordinate choice for locomotion systems with toroidal shape spaces
- Bo Lin, Baxi Chong, Yasemin Ozkan-Aydin, Enes Aydin, Howie Choset, Daniel I. Goldman, Greg Blekherman
2020 International Conference on Intelligent Robots and Systems (IROS), pages 7501-7506
- Robophysical modeling of bilaterally activated and soft limbless locomotors,
- Perrin E. Schiebel, Marine C. Maisonneuve, Kelimar Diaz, Jennifer M. Rieser, and Daniel I. Goldman,
Living Machines (2020), pages 300-311

- Stretchable Nanocomposite Sensors, Nanomembrane Interconnectors, and Wireless Electronics toward Feedback−Loop Control of a Soft Earthworm Robot,
- Riccardo Goldoni, Yasemin Ozkan-Aydin, Yun-Soung Kim, Jongsu Kim, Nathan Zavanelli, Musa Mahmood, Bangyuan Liu, Frank L. Hammond, Daniel I. Goldman, and Woon-Hong Yeo,
ACS Applied Materials and Interfaces (2020), Volume 12, Number 39, pages 43388-43397

- Comparative study of snake lateral undulation kinematics in model heterogeneous terrain,
- Perrin E Schiebel, Alex M Hubbard, Daniel I Goldman,
Integrative and Comparative Biology (2020), Volume 63, Issue 1, July 2023, Pages 198–208, https://doi.org/10.1093/icb/icaa125
- Side-impact collision: mechanics of obstacle negotiation in sidewinding snakes,
- Henry C Astley, Jennifer M Rieser, Abdul Kaba, Veronica M Paez, Ian Tomkinson, Joseph R Mendelson III, and Daniel I Goldman,
Bioinspiration and Biomimetics (2020), Volume 15, Number 6, 065005
- Learning Terrain Dynamics: A Gaussian Process Modeling and Optimal Control Adaptation Framework Applied to Robotic Jumping,
- Alexander H. Chang, Christian M. Hubicki, Jeffrey J. Aguilar, Daniel I. Goldman, Aaron D. Ames, and Patricio A. Vela,
IEEE Transactions on Control Systems Technology, (2020), Volume 29, Issue 4, pages 1581-1596

- A systematic approach to creating terrain-capable hybrid soft/hard myriapod robots,
- Yasemin Ozkan-Aydin, Baxi Chong, Enes Aydin, Daniel I. Goldman,
2020 3rd IEEE International Conference on Soft Robotics (RoboSoft), pages 156-163
- Mitigating memory effects during undulatory locomotion on hysteretic materials,
- Perrin E Schiebel, Henry C Astley, Jennifer M Rieser, Shashank Agarwal, Christian Hubicki, Alex M Hubbard, Kelimar Diaz, Joseph R Mendelson III, Ken Kamrin, Daniel I Goldman,
eLife Sciences (2020), Volume 9, e51412

- Material remodeling and unconventional gaits facilitate locomotion of a robophysical rover over granular terrain,
- Siddharth Shrivastava, Andras Karsai, Yasemin Ozkan Aydin, Ross Pettinger, William Bluethmann, Robert O. Ambrose, Daniel I. Goldman,
Science Robotics (2020), Volume 5, Issue 42, eaba3499
- 2019
- Modeling of the interaction of rigid wheels with dry granular media,
- Shashank Agarwal, Carmine Senatore, Tingnan Zhang, Mark Kingsbury, Karl Iagnemma, Daniel I. Goldman, Ken Kamrin,
Journal of Terramechanics (2019), Volume 85, pages 1-14
- A robot made of robots: Emergent transport and control of a smarticle ensemble,
- William Savoie, Thomas A. Berrueta, Zachary Jackson, Ana Pervan, Ross Warkentin, Shengkai Li, Todd D. Murphey, Kurt Wiesenfeld and Daniel I. Goldman,
Science Robotics (2019), Volume 4, Issue 34
- A Hierarchical Geometric Framework to Design Locomotive Gaits for Highly Articulated Robots,
- Baxi Chong, Yasemin Ozkan Aydin, Guillaume Sartoretti, Jennifer M Rieser, Chaohui Gong, Haosen Xing, Howie Choset and Daniel I Goldman,
Robotics: Science and Systems · A Robotics Conference (RSS 2019), Freiburg, Europe.
- Kirigami Skin Improves Soft Earthworm Robot Anchoring and Locomotion Under Cohesive Soil,
- Bangyuan Liu, Yasemin Ozkan-Aydin, Daniel I. Goldman, and Frank L. Hammond III,
IEEE International Conference on Soft Robotics (RoboSoft),Seoul, Korea, April 14~18, 2019.
- Nutation Aids Heterogeneous Substrate Exploration in a Robophysical Root,
- Yasemin Ozkan-Aydin, Mason Murray-Cooper, Enes Aydin, Erin N. McCaskey, Nicholas Naclerio,Elliot W. Hawkes and Daniel I. Goldman,
IEEE International Conference on Soft Robotics (RoboSoft),Seoul, Korea, April 14~18, 2019.
- Mechanical diffraction reveals the role of passive dynamics in a slithering snake,
- Perrin E. Schiebel, Jennifer M. Rieser, Alex M. Hubbard, Lillian Chen, D. Zeb Rocklin, Daniel I. Goldman,
PNAS (2019), 201808675.
- Dynamics of scattering in undulatory active collisions,
- Jennifer M. Rieser, Perrin E. Schiebel, Arman Pazouki, Feifei Qian, Zachary Goddard, Kurt Wiesenfeld, Andrew Zangwill, Dan Negrut, and Daniel I. Goldman,
Physical Review E (2019) Volume 99, Issue 2, 022606.
- 2018
- Bipedal Locomotion Up Sandy Slopes: Systematic Experiments Using Zero Moment Point Methods,
- Jonathan R. Gosyne, Christian M. Hubicki, Xiaobin Xiong, Aaron D. Ames, and Daniel I. Goldman,
IEEE-RAS International Conference on Humanoid Robots (Humanoids) (2018).
- Phototactic Supersmarticles,
- William Savoie, Sarah Cannon, Joshua J. Daymude, Ross Warkentin, Shengkai Li, Andréa W. Richa, Dana Randall, Daniel I. Goldman,
Artificial Life and Robotics (2018) Volume 23, Issue 4, pp 459–468.

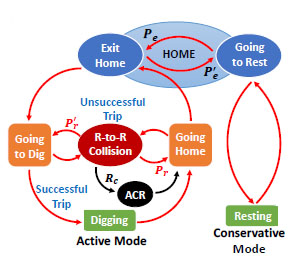
- Collective clog control: Optimizing traffic flow in confined biological and robophysical excavation,
- J. Aguilar, D. Monaenkova, V. Linevich, W. Savoie, B. Dutta, H.S. Kuan, M. D. Betterton, M. A. D. Goodisman, D. I. Goldman,
Science (2018) Volume 361, Issue 6403, pp. 672-677.
- Coordination of back bending and leg movements for quadrupedal locomotion,
- Baxi Zhong , Yasemin Ozkan Aydin , Chaohui Gong , Guillaume Sartoretti , Yunjin Wu , Jennifer Rieser , Haosen Xing , Jeffery Rankin, Krijn Michel,
Alfredo Nicieza, John Hutchinson, Daniel I Goldman and Howie Choset
Robotics: Science and Systems (RSS) (2018)

- Soft Robotic Burrowing Device with Tip-Extension and Granular Fluidization,
- Nicholas D. Naclerio, Christian M. Hubicki, Yasemin Ozkan Aydin, Daniel I. Goldman, Elliot W. Hawkes,
IROS (2018), pp. 5918-5923
- Design of a Soft Robophysical Earthworm Model,
- Yasemin O. Aydin, Jennifer L. Molnar, Daniel I. Goldman, and Frank L.
Hammond III,
IEEE-RAS International Conference on Soft Robotics (RoboSoft) (2018)
- Locomoting robots composed of immobile robots,
- Ross Warkentin, William Savoie, Daniel I. Goldman,
Second IEEE International Conference on Robotic Computing (IRC) (2018) pp. 224-227
- 2017
- Collisional Diffraction Emerges from Simple Control of Limbless Locomotion,
- Perrin E Schiebel, Jennifer M Rieser, Alex Hubbard, Lillian Chen, and
Daniel I. Goldman,
Conference on Biomimetic and Biohybrid Systems (611-618), Springer (2017)
- A Stability Region Criterion for Flat-footed Bipedal Walking on Deformable Granular Terrain,
- Xiaobin Xiong, Aaron D. Ames, and Daniel I. Goldman,
IEEE International Conference on Intelligent Robots and Systems (IROS) (2017)
- Geometric Mechanics Applied to Tetrapod Locomotion on Granular Media,
- Yasemin Ozkan Aydin, Baxi Chong, Chaohui Gong, Jennifer M. Rieser, Jeffery W. Rankin, Krijn Michel, Alfredo G. Nicieza,
John Hutchinson, Howie Choset, Daniel I. Goldman,
Conference on Biomimetic and Biohybrid Systems (595-603), Springer (2017)
- 2016
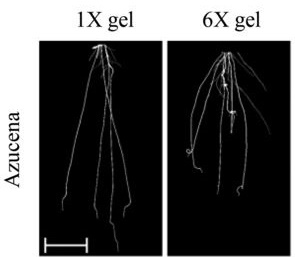
- X-ray computed tomography reveals the response of root system architecture to soil texture,
- Eric Rogers, Daria Monaenkova, Medhavinee Mijar, Apoorva Nori, Daniel I. Goldman, and Philip Benfey,
Plant Physiology (2016)
- Tractable Terrain-aware Motion Planning on Granular Media: An Impulsive Jumping Study,
- Christian M. Hubicki, Jeffrey J. Aguilar, Daniel I. Goldman, and Aaron D. Ames,
IEEE International Conference on Intelligent Robots and Systems (IROS) (2016)
- Shape-Based Compliance in Locomotion,
- Matt Travers, Julian Whitman, Perrin Schiebel, Daniel I. Goldman, and Howie Choset,
Robotics: Science & Systems (RSS) (2016)
- Robophysical Study of Excavation in the Confined Environments,
- Vadim Linevich, Daria Monaenkova and Daniel I. Goldman,
Artificial Life and Robotics, 21, 460-465 (2016)
- Awarded best paper at SWARM 2015
- Simplifying Gait Design via Shape Basis Optimization,
- Chaohui Gong, Daniel I. Goldman and Howie Choset,
Robotics: Science & Systems (RSS) (2016).
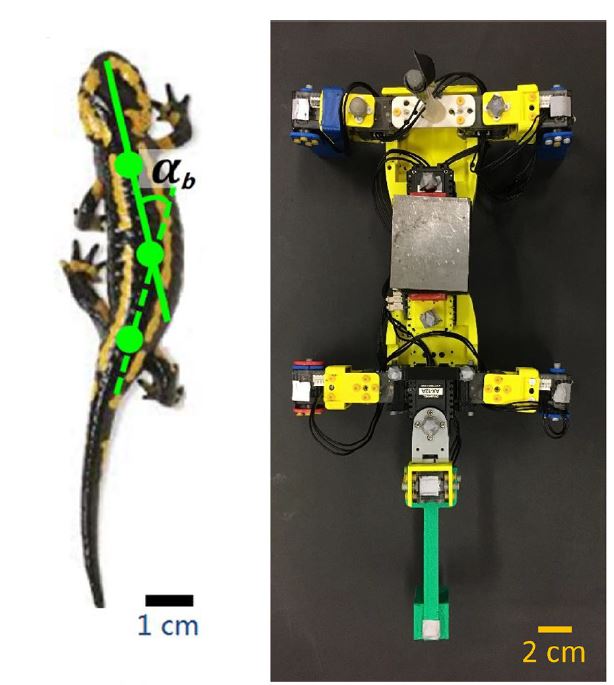
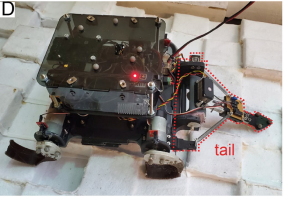
- Tail use improves soft substrate performance in models of early vertebrate land locomotors,
- Benjamin McInroe, Henry C. Astley, Chaohui Gong, Sandy M. Kawano, Perrin E. Schiebel, Jennifer M. Rieser, Howie Choset, Richard W. Blob, Daniel I. Goldman,
Science, 353, 154-158, (2016)

- Geometric Swimming on a Granular Surface,
- Jin Dai, Hossein Faraji, Chaohui Gong, Ross L. Hatton, Daniel I. Goldman, and Howie Choset,
Robotics: Science & Systems (RSS) (2016)
- Robophysical study of jumping dynamics on granular media,
- Jeffrey Aguilar and Daniel I. Goldman
Nature Physics, 12, 278-283 (2016).
- 2015

- Glass-like dynamics in confined and congested ant traffic,
- Nick Gravish, Gregory Gold, Andrew Zangwill, Michael A. D. Goodisman and Daniel I. Goldman,
Soft Matter, 11, 6552-6561 (2015).
- Behavioral and mechanical determinants of collective subsurface nest excavation,
- Daria Monaenkova, Nick Gravish, Greggory Rodriguez, Rachel Kutner, Michael A. D. Goodisman and Daniel I. Goldman,
J. Exp. Biol. 218, 1295-1305 (2015).

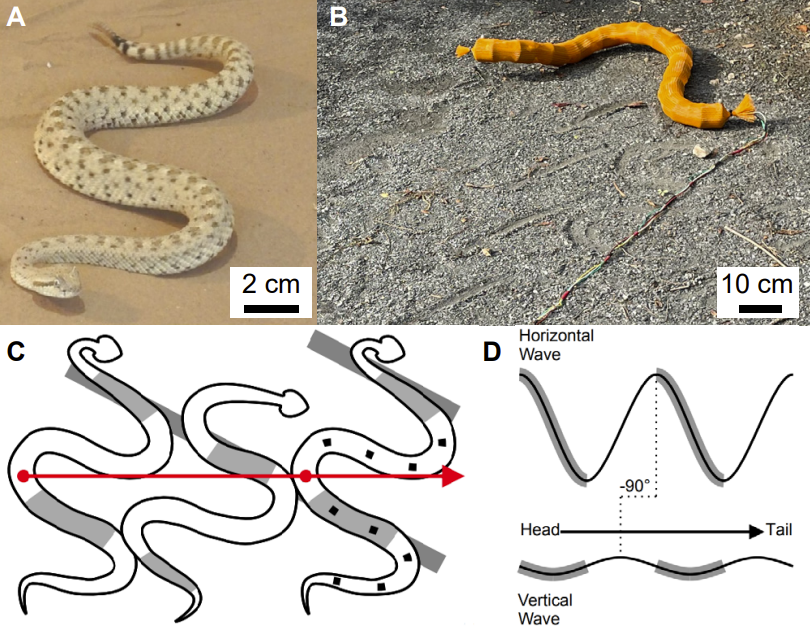
- Modulation of orthogonal body waves enables high maneuverability in sidewinding locomotion,
- Henry C. Astley, Chaohui Gong, Jin Dai, Matthew Travers, Miguel M. Serrano, Patricio A. Vela, Howie Choset, Joseph R. Mendelson III,
David L. Hu, and Daniel I. Goldman,
PNAS, 112, 6200 (2015).
- Smarticles: design and construction of smart particles to aid discovery of principles of smart, active granular matter,
- William Savoie, Arman Pazouki, Dan Negrut, and Daniel I. Goldman,
SWARM 2015 conference paper (2015)

- Locomotor benefits of being a slender and slick sand-swimmer,
- Sarah S. Sharpe, Stephan A. Koehler, Robyn Kuckuk, Miguel Serrano, Patricio Vela, Joseph Mendelson III, and Daniel I. Goldman,
Journal of Experimental Biology, 218, 440-450 (2015)

- Controlled preparation of wet granular media reveals limits to lizard burial ability,
- Sarah S. Sharpe, Robyn Kuckuk, and Daniel I. Goldman,
Physical Biology, 12, 046009 (2015)
- Principles of appendage design in robots and animals determining terradynamic performance on flowable ground,
- Feifei Qian, Tingnan Zhang, Wyatt L. Korff, Paul B. Umbanhowar, Robert J. Full, and Daniel I. Goldman,
Bioinspiration & Biomimetics (2015).
- Kinematic gait synthesis for snake robots,
- Chaohui Gong, Matthew J. Travers, Henry C. Astley, Lu Li, Joseph R. Mendelson III, Daniel I. Goldman, and Howie Choset,
IJRR (2015).

- Anticipatory control using substrate manipulation enables trajectory control of legged locomotion
on heterogeneous granular media,
- Feifei Qian and Daniel I. Goldman,
SPIE (2015).
- The dynamics of legged locomotion in heterogeneous terrain: universal scattering and sensitivity to initial conditions,
- Feifei Qian and Daniel I. Goldman,
Robotics: Science & Systems (RSS) (2015).
- 2014

- Sidewinding with minimal slip: snake and robot ascent of sandy slopes,
- Hamidreza Marvi, Chaohui Gong, Nick Gravish, Henry Astley, Matthew Travers, Ross L. Hatton, Joseph R. Mendelson III, Howie Choset,
David L. Hu, and Daniel I. Goldman,
Science, 346, 224 (2014)
- The effect of volume fraction on granular avalanche dynamics,
- Nick Gravish, and Daniel I. Goldman,
Physical Review E, 90, 032202 (2014)
- Force and flow at the onset of drag in plowed granular media,
- Nick Gravish, Paul B Umbanhowar, and Daniel I. Goldman,
Physical Review E, 89, 042202 (2014)
- Conditioned basis array factorization: an approach to gait pattern extraction,
- Chaohui Gong, Matthew Travers, Henry Astley, Lu Li, Joe Mendelson, David Hu, Daniel I. Goldman, Howie Choset,
RSS (2014)
- 2013
- Swimming in the desert,
- Yang Ding, Chen Li, and Daniel I. Goldman,
Physics Today, November, pg. 68 (2013)
- Emergence of the advancing neuromechanical phase lag in a resistive force dominated medium,
- Yang Ding, Sarah S. Sharpe, Kurt Wiesenfeld, and Daniel I. Goldman,
PNAS, 110, 10123-10128 (2013)

- Climbing, falling and jamming during ant locomotion in confined environments,
- Nick Gravish, Daria Monaenkova, Michael A. D. Goodisman, and Daniel I. Goldman,
PNAS, 110, 9746-9751 (2013)
- A terradynamics of legged locomotion on granular media,
- Chen Li, Tingnan Zhang, and Daniel I. Goldman,
Science, 339, 1408 (2013)
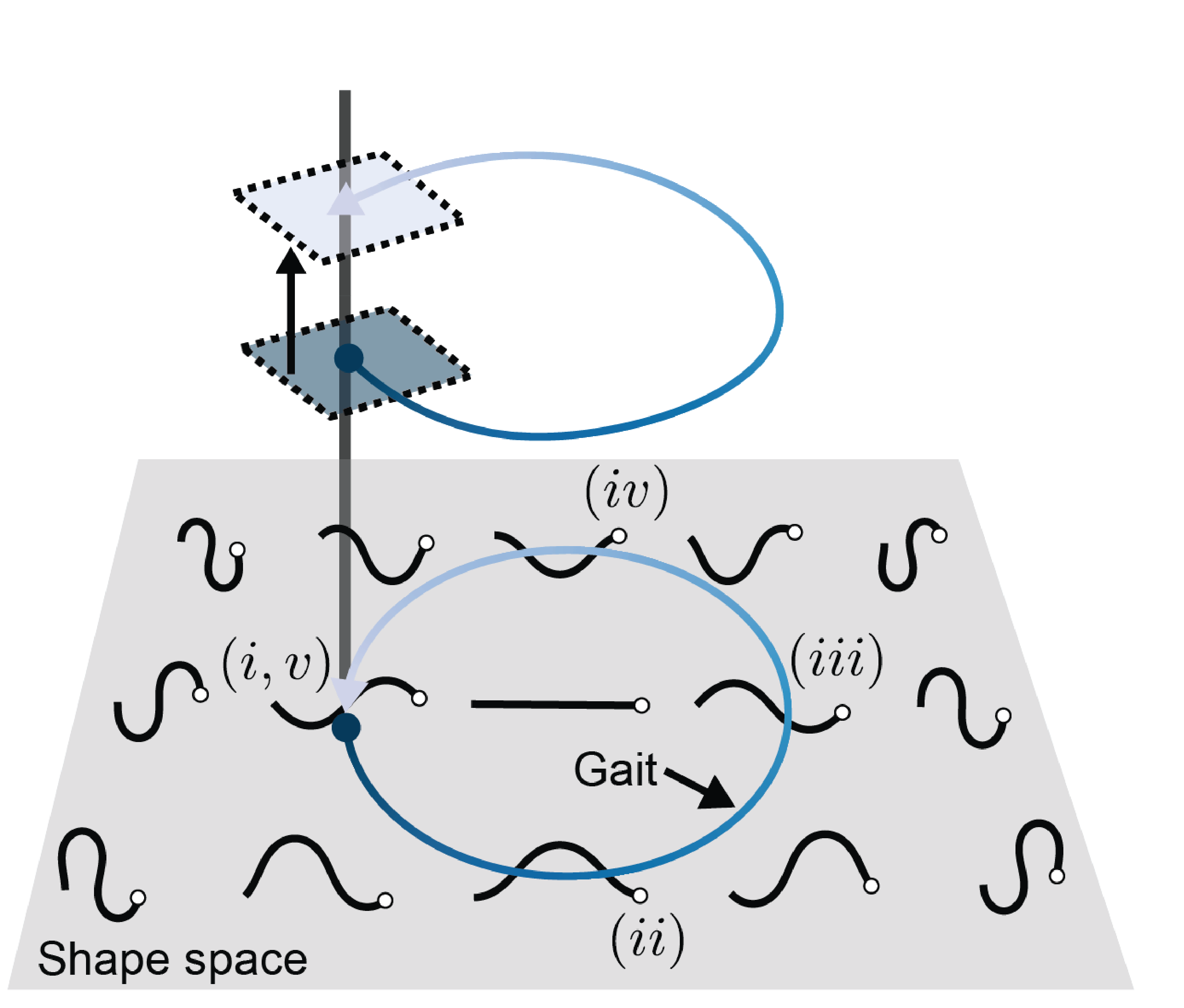
- Geometric visualization of self-propulsion in a complex medium
- Ross Hatton, Yang Ding, Howie Choset, and Daniel I. Goldman,
Physical Review Letters 110, 078101 (2013)
- Flipper driven terrestrial locomotion of a sea turtle inspired robot,
- Nicole Mazouchova, Paul B. Umbanhowar, and Daniel I. Goldman,
Bioinspiration & Biomimetics, 8, 026007 (2013)
- Ground fluidization promotes rapid running of a lightweight robot,
- Tingnan Zhang, Feifei Qian, Chen Li, Pierangelo Masarati, Paul Birkmeyer, Andrew Pullin, Aaron Hoover, Ronald S. Fearing, and Daniel I. Goldman,
International Journal of Robotics Research, 32, 859 (2013)

-
An automated system for systematic testing of locomotion on heterogeneous granular media,
- Feifei Qian, Tingnan Zhang, Kevin Daffon, and Daniel I. Goldman,
CLAWAR (2013)
- 2012
-
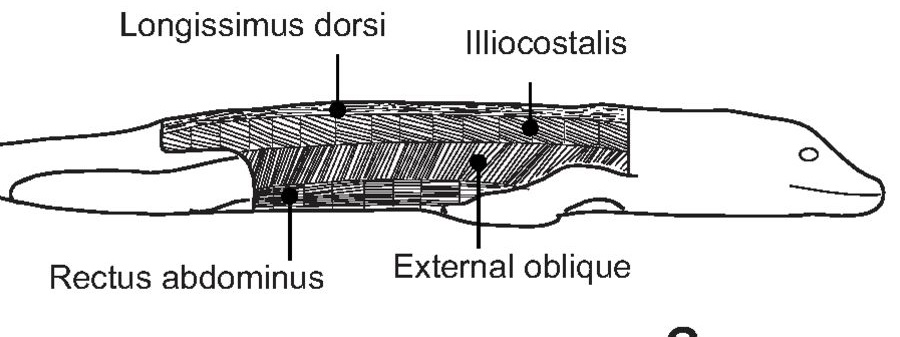
Environmental interaction influences muscle activation strategy during sand-swimming in the sandfish lizard (Scincus scincus)
- Sarah S. Sharpe, Yang Ding, and Daniel I. Goldman,
Journal of Experimental Biology, 216, 260 (2012)
-
Mechanics of undulatory swimming in a frictional fluid,
- Yang Ding, Sarah S. Sharpe, Andrew Masse, and Daniel I. Goldman,
PLoS Computational Biology, 8(12): e1002810 (2012)
-
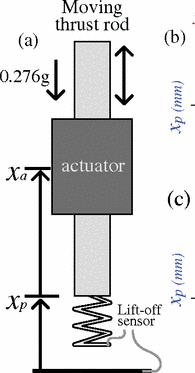
Lift-off dynamics in a simple jumping robot,
- Jeffrey Aguilar, Alex Lesov, Kurt Wiesenfeld and Daniel I. Goldman,
Physical Review Letters, 109, 174301 (2012)
-
Entangled granular media,
- Nick Gravish, Scott V. Franklin, David L. Hu, and Daniel I. Goldman,
Physical Review Letters, 108, 208001 (2012)
-
Effects of worker size on the dynamics of fire ant tunnel construction,
- Nick Gravish, Mateo Garcia, Nicole Mazouchova, Laura Levy, Paul B. Umbanhowar, Michael A. D. Goodisman, and Daniel I. Goldman,
Journal of the Royal Society Interface, 9, 3312 (2012)

-
Multi-functional foot use during running of the zebra-tailed lizard (Callisaurus draconoides)
- Chen Li, S. Tonia Hsieh, and Daniel I. Goldman,
Journal of Experimental Biology, 215, 3293, (2012)
-
Walking and running on yielding and fluidizing ground,
- Feifei Qian, Tingnan Zhang, Chen Li, Pierangelo Masarati, Paul Birkmeyer, Andrew Pullin, Aaron Hoover, Ronald S. Fearing, and Daniel I. Goldman,
Robotics: Science and Systems (RSS) conference (2012)

-
Using computational and mechanical models to study animal locomotion,
- Laura A. Miller, Daniel I. Goldman, Tyson L. Hedrick, Eric D. Tytell, Jane Wang, Jeannette Yen, and Silas Alben,
Integrative and Comparative Biology, 52, 553 (2012)
-
Geometric mechanics for sand swimming,
- Ross Hatton, Yang Ding, Howie Choset, and Daniel I. Goldman,
CLAWAR (2012)
-
A resistive force model for legged locomotion on granular media,
- Chen Li, Tingnan Zhang, and Daniel I. Goldman,
CLAWAR (2012)
-
Towards a terramechanics for bio-inspired locomotion in granular environments,
- Chen Li, Yang Ding, Nick Gravish, Paul B. Umbanhowar, Haldun Komsuoglu, Daniel E. Koditschek, and Daniel I. Goldman,
ASCE, Earth and Space 2012 conference (2012).
- 2011

-
Mechanical models of sandfish locomotion reveal principles of high performance subsurface sand-swimming,
- Ryan D. Maladen, Yang Ding, Paul B. Umbanhowar, Adam Kamor, and Daniel I. Goldman,
Journal of the Royal Society Interface, 8, 1332-1345 (2011)
-
Drag induced lift in granular media,
- Yang Ding, Nick Gravish and Daniel I. Goldman,
Physical Review Letters, 106, 028001 (2011)
-
Granular lift forces predict vertical motion of a sand-swimming robot,
- Ryan D. Maladen, Paul B. Umbanhowar, Yang Ding, Andrew Masse and Daniel I. Goldman,
ICRA, (2011)
-
Undulatory swimming in sand: experimental and simulation studies of a robotic sandfish,
- Ryan D. Maladen, Yang Ding, Paul B. Umbanhowar, and Daniel I. Goldman,
International Journal of Robotic Research, 30, 793-805 (2011)
- 2010

-
Force and flow transition in plowed granular media
- Nick Gravish, Paul B. Umbanhowar and Daniel I. Goldman,
Physical Review Letters, 105, 128301 (2010)
-
Granular impact and the critical packing state,
- Paul B. Umbanhowar and Daniel I. Goldman,
PRE Rapid Communications, 82, 010301R, (2010)
-
Wiggling Through the World,
- Daniel I. Goldman and David L. Hu,
American Scientist, July/August 2010

-
Biophysically inspired development of a sand-swimming robot,
- Ryan D. Maladen, Yang Ding, Paul B. Umbanhowar, Adam Kamor and Daniel I. Goldman
Robotics: Science & Systems (RSS) 2010
-
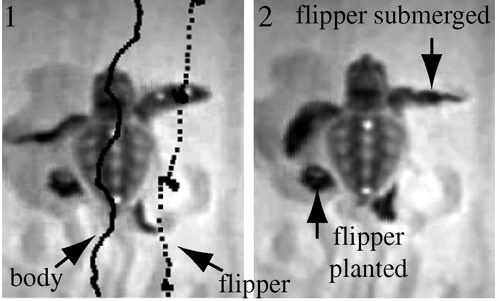
Utilization of granular solidification during terrestrial locomotion of hatchling sea turtles,
- Nicole Mazouchova, Nick Gravish, Andrei Savu, and Daniel I. Goldman,
Biology Letters,6,398,(2010)
-
The effect of limb kinematics on the speed of a legged robot on granular media,
- Chen Li, Paul B. Umbanhowar, Haldun Komsuoglu,
and Daniel I. Goldman,
Experimental Mechanics, 50, 1383 (2010)
-
Systematic study of the performance of small robots on controlled laboratory substrates,
- Chen Li, Aaron M. Hoover, Paul Birkmeyer, Paul B. Umbanhowar, Ronald S. Fearing, Daniel I. Goldman,
Proceedings of SPIE, 7679, 76790Z, (2010)
- 2009
-
Undulatory swimming in sand: subsurface locomotion of the sandfish lizard,
- Ryan Maladen, Yang Ding, Chen Li and Daniel I. Goldman,
Science, 325, 314 (2009)
-
Sensitive dependence of the motion of a legged robot on granular media,
- Chen Li, Paul B. Umbanhowar, Haldun Komsuoglu, Daniel E. Koditschek, Daniel I. Goldman,
PNAS, 106, 3029, (2009)
-
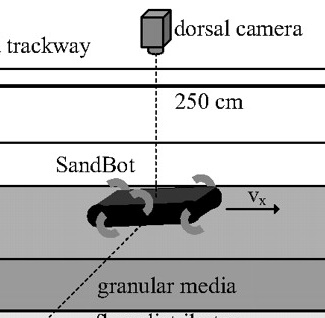
March of the SandBots,
- Daniel I. Goldman, Haldun Komsuoglu, Daniel E. Koditschek,
IEEE Spectrum, April 2009, pg. 30.
- 2008
-
Integrating a Hierarchy of Simulation Tools for Legged Robot Locomotion,
- Andrew Slatton, Daniel Cohen, Yang Ding, Paul B. Umbanhowar, Daniel I.
Goldman, G. Clark Haynes, Haldun Komsuoglu, and Daniel E. Koditschek,
IROS 2008
-
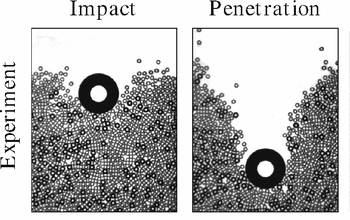
Scaling and Dynamics of Sphere and Disk Impact into Granular Media,
- Daniel I. Goldman and Paul B. Umbanhowar,
PRE, 77, 021308 (2008)
-
Active Tails Enhance Arboreal Acrobatics in Geckos,
- Ardian Jusufi, Daniel I. Goldman, Shai Revzen, and Robert J. Full,
PNAS, 105, 4215 (2008)
- 2007
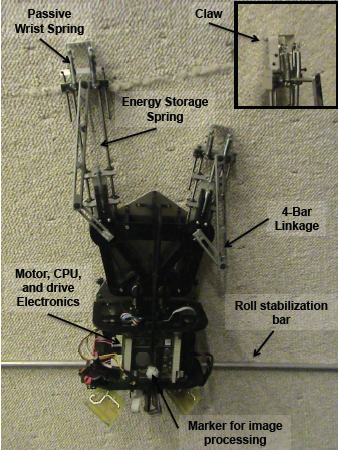
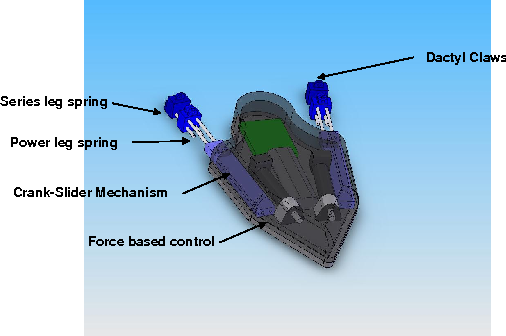
-
Design of a Bio-inspired Dynamical Vertical Climbing Robot,
- Jonathan E. Clark, Daniel I. Goldman, Pei-Chun Lin, Goran
Lynch, Tao S. Chen, Haldun Komsuoglu, Robert J. Full, and Daniel E. Koditschek,
Proceedings of Robotics: Science and Systems (2007)

-
Distributed mechanical feedback in arthropods and robots simplifies control of rapid running on challenging terrain
- Joseph C. Spagna, Daniel I. Goldman, Pei-Chun Lin, Daniel E. Koditschek and Robert J. Full,
Bioinspiration and Biomimetics, 2 9-18 (2007)
- 2006
-
Toward a dynamic climbing robot,
- Jonathan E. Clark, Daniel I. Goldman, Tao S. Chen, Robert J. Full and Daniel E. Koditschek,
submitted to CLAWAR 2006, 9th International Conference on Climbing and Walking Robots
-
Dynamics of rapid vertical climbing in a cockroach reveals a template,
- Daniel I. Goldman, Tao S. Chen, Daniel M. Dudek and Robert J. Full,
The Journal of Experimental Biology, 209, 2990-3000 (2006)
-
Signatures of glass formation in a fluidized bed of hard spheres,
- Daniel I. Goldman and Harry L. Swinney,
PRL 96, 145702 (2006).
-
Low density fragile states in cohesive powders,
- Paul B. Umbanhowar and Daniel I. Goldman,
American Journal of Physics, 74, 720-721 (2006)

-
The RiSE Climbing Robot: Body and Leg Design,
- A. Saunders, D. I. Goldman, R. J. Full, and M. Buehler,
Unmanned Systems Technology VIII, SPIE, 6230, 623017 (2006)
- 2005

-
Robotics in Scansorial Environments,
- Kellar Autumn, Martin Buehler, Mark Cutkosky, Ronald Fearing, Robert J. Full, Daniel Goldman, Richard Groff, William Provancher, Alfred E. Rizzi,
Uluc Saranli, Aaron Saunders and Daniel Koditschek,
Unmanned Ground Vehicle Technology VII, eds. Grant R.
Gerhart, Charles M. Shoemaker, Douglas W. Gage, Proceedings of SPIE Vol. 5804, 291-302 (2005).
-
Stationary state volume fluctuations in a granular medium,
- Matthias Schroeter, Daniel I. Goldman and Harry L. Swinney,
PRE Rapid Communications 71, 030301 (2005).
- 2004
-
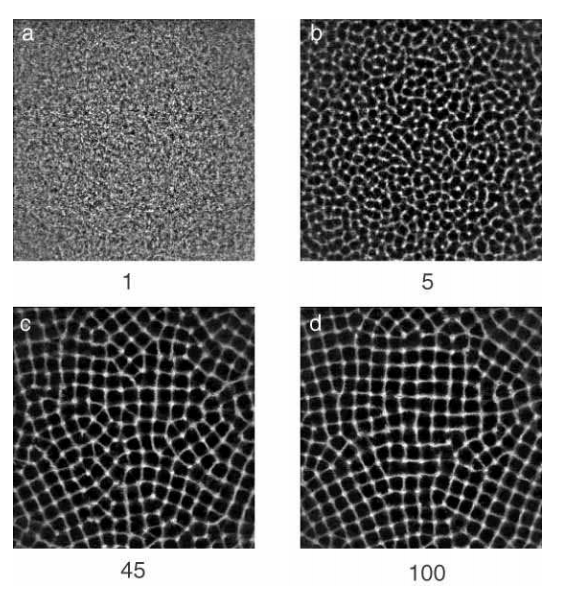
Noise, coherent fluctuations, and the onset of order in an oscillated granular fluid,
- Daniel I. Goldman, J. B. Swift and Harry L. Swinney,
PRL 92, 174302 (2004).
-
Mach cone in a shallow granularfluid,
- Patrick Heil, E. C. Rericha, Daniel I. Goldman and Harry L. Swinney,
PRE Rapid Communications 70, 060301 (2004).
-
Crucial role of sidewalls in velocity distributions in quasi-2D granular gases,
- J. S. van Zon, J. Kreft, Daniel I. Goldman, D. Miracle, J. B. Swift, and Harry L. Swinney,
PRE Rapid Communications 70, 040301 (2004).
-
Persistent holes in a fluid,
- Florian S. Merkt, Robert D. Deegan, Daniel I. Goldman, Erin C. Rericha and Harry L. Swinney,
PRL 92, 184501 (2004)
-
Dynamics of drag and force distributions for projectile impact in a granular medium,
- Massimo Pica Ciamarra, Antonio H. Lara, Andrew T. Lee, Daniel I. Goldman, Inna Vishik and Harry L. Swinney,
PRL 92, 194301 (2004).
-
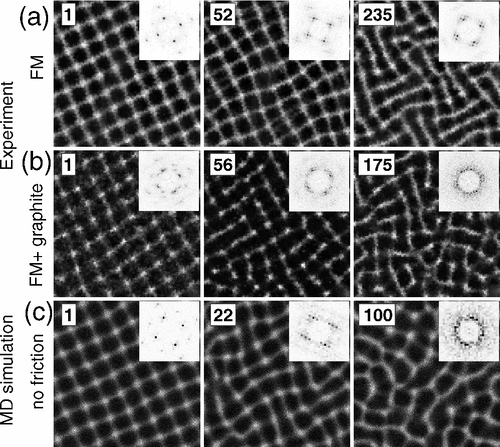
Stages of relaxation of patterns and the role of stochasticity on the final stage,
- Shaowen Hu, Daniel I. Goldman, Donald J. Kouri, David K. Hoffman, Harry L. Swinney and Gemunu H. Gunaratne,
Nonlinearity 17, 1535 (2004).
- 2003
-
Lattice dynamics and melting of a nonequilibrium pattern,
- Daniel I. Goldman, M. D. Shattuck, Sung Joon Moon, J. B. Swift, Harry L. Swinney,
PRL 90, 104302 (2003).
-
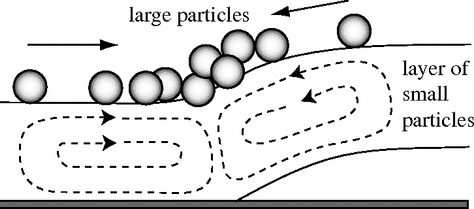
Kink-induced transport and segregation in oscillated granular layers,
- Sung Joon Moon, Daniel I. Goldman, J. B. Swift, and Harry L. Swinney,
PRL 91, 134301 (2003).
- 2002
-
Emergence of order in an oscillated granular layer,
- Daniel. I. Goldman, M. D. Shattuck, Harry L. Swinney, Gemunu H. Gunaratne,
Physica A 306,180 (2002).
-
Phase bubbles and spatiotemporal chaos in granular patterns,
- Sung Joon Moon, M. D. Shattuck, C. Bizon, Daniel I. Goldman, J. B. Swift, Harry L. Swinney,
PRE 65, 011301 (2002).
- 1998
-
Absence of inelastic collapse in a realistic three ball model
- Daniel I. Goldman, M. D. Shattuck, C. Bizon, W. D. McCormick, J. B. Swift, Harry L. Swinney
PRE 57, 4831 (1998)
-
Continuum-type stability balloon in oscillated granular layers,
- J. R. De Bruyn, C. Bizon, M. D. Shattuck, Daniel I. Goldman, J. B. Swift, Harry L. Swinney
PRL 81, 1421 (1998).
- 2025

-
Mechanically Intelligent Elongate Limbless Robots for Locomotion in Complex Land and Water
- Tianyu Wang,
Robotics PhD Dissertation, Georgia Institute of Technology, 2025.
- 2025

-
Collision Induced Self Organization in Shape Changing Robots
- Akash Vardhan,
Physics PhD Dissertation, Georgia Institute of Technology, 2025.
- 2024

-
Coordination of Robot Swarms in Crowded and Confined Conditions
- Kehinde Aina,
Robotics PhD Dissertation, Georgia Institute of Technology, 2024.
- 2022

-
Simplifying Robotic Locomotion by Escaping Traps via an Active Tail,
- Daniel Soto,
Mechanical Engineering Masters Dissertation, Georgia Institute of Technology, 2022.

-
Geometric Modeling of Biological and Robotic Locomotion in Highly Damped Environments,
- Baxi Zhong,
Quantitative Biosciences PhD Dissertation, Georgia Institute of Technology, 2022.

-
Non-Inertial Undulatory Locomotion Across Scales,
- Kelimar Diaz Cruz,
Quantitative Biosciences PhD Dissertation, Georgia Institute of Technology, 2022.
-
Rate-dependent Locomotion and Intrusion Phenomena in Granular Media,
- Andras Karsai,
Physics PhD Dissertation, Georgia Institute of Technology, 2022.
-
Field-Mediated Interaction in Active Matter,
- Shengkai Li,
Physics PhD Dissertation, Georgia Institute of Technology, 2022.
- 2019

-
Limbless Locomotion in Complex Terrestrial Terrain,
- Perrin Schiebel,
Physics PhD Dissertation, Georgia Institute of Technology, 2019.

-
Effect of Shape and Particle Coordination on Collective Dynamics of Granular Matter,
- William C. Savoie,
Physics PhD Dissertation, Georgia Institute of Technology, 2019.
- 2018

-
Developing an Anticipatory Controller to Imrove Performance of a Snake-like Robot in Unstructured Terrain,
- Ian Tomkinson,
Mechanical Engineering Masters Dissertation, Georgia Institute of Technology, 2018.
- 2017

-
Design of Robotic Platforms to Model Confined Active Matters,
- Ross J. Warkentin,
Mechanical Engineering Masters Dissertation, Georgia Institute of Technology, 2017.
- 2016

-
Probing the Dynamics of a Simple Jumping Robot on Hard and Soft Ground,
- Jeffrey J. Aguilar,
Mechanical Engineering PhD Dissertation, Georgia Institute of Technology, 2016.

-
A Robophysics Approach to Bipedal Walking in Granular Media,
- Mark Kingsbury,
Physics PhD Dissertation, Georgia Institute of Technology, 2016.
-
Modeling and Control of Locomotion in Complex Environments,
- Tingnan Zhang,
Physics PhD Dissertation, Georgia Institute of Technology, 2016.
- 2015

-
Towards a Terradynamics of Legged Locomotion on Homogenous and Heterogeneous Granular Media Through Robophysical Approaches,
- Feifei Qian,
Electrical and Computer Engineering PhD Dissertation, Georgia Institute of Technology, 2015.

-
Design of a Robotic Ant to Model Collective Excavation,
- Vadim Linevich,
Mechanical Engineering Masters Dissertation, Georgia Institute of Technology, 2015.
- 2013

-
Control of Burial and Subsurface Locomotion In Particulate Substrates,
- Sarah S. Sharpe,
Bioengineering PhD Dissertation, Georgia Institute of Technology, 2013.

-
Collective Dynamics Of Matter With Granularity,
- Nicholas G. Gravish,
Physics PhD Dissertation, Georgia Institute of Technology, 2013.
- 2012
-
Exploring Lift-Off Dynamics In a Jumping Robot,
- Jeffrey J. Aguilar,
Master of Science in Mechanical Engineering Dissertation, Georgia Institute of Technology, 2012.

-
Principles Of Fin and Flipper Locomotion On Granular Media,
- Nicole Mazouchova,
Biology Masters Dissertation, Georgia Institute of Technology, 2012.
- 2011
-
Biological, Robotic, and Physics Studies to Discover Principles of Legged Locomotion on Granular Media,
- Chen Li,
Physics PhD Dissertation, Georgia Institute of Technology, 2011.

-
Simulation and Theoretical Study of Swimming and Resistive Forces Within Granular Media,
- Yang Ding,
Physics PhD Dissertation, Georgia Institute of Technology, 2011.
- 2010

-
Biological, Simulation, and Robotic Studies to Discover Principles of Swimming Within Granular Media,
- Ryan D. Maladen,
Bioengineering PhD Dissertation, Georgia Institute of Technology, 2010.
- 2002

-
Pattern formation and fluidization in vibrated granular layers, and grain dynamics and jamming in a water fluidized bed,
- Daniel I. Goldman,
PhD Dissertation, The University of Texas at Austin, 2002.